
当前很多主机厂都推出了基于激光雷达的L3级自动驾驶汽车,例如极狐阿尔法S,蔚来ET7,极氪001等车型,为满足车规级要求,大部分厂商选择使用固态激光雷达作为感知传感器并配合摄像头进行感知。本文将介绍固态激光雷达的相关属性、点云质量问题以及未来发展趋势。
1、固态激光雷达技术
固态激光雷达是完全没有移动部件的雷达,光相控阵(Optical Phased Array)及Flash是其典型技术路线,也被认为是纯固态激光雷达方案。目前主要使用的是MEMS(微机电系统)激光雷达。

图1 固态激光雷达的布置效果图
2、固态激光雷达的一般选型参数要求
固态激光雷达一般最远可以探测大约200米的物体。对于激光雷达基本参数要求可分为远距雷达和近距雷达要求。
对于远距雷达要求:
(1)垂直FOV在20-40°,水平FOV在120°左右
(2)最远测距距离在200m左右,在120m-150m达到最佳效果
(3)绝对测距精度:越低越好,市面上一般的雷达在±5cm以内
(4)相对测距精度:5cm-10cm@1σ为益
(5)水平和垂直角度分辨率:分辨率越高越好,当前一般可达到最高0.1°
(6)可直接使用车载电源供电,满足车规级温度要求
(7)满足车规级DV和PV测试要求
对于近距雷达要求:
(1)垂直FOV在70°-120°范围内为益,水平FOV在140°左右
(2)最远测距距离在50m左右,在10m-30m达到最佳效果
(3)绝对测距精度:越低越好,市面上一般的雷达在±5cm以内
(4)相对测距精度:2cm-5cm@1σ为益
(5)水平和垂直角度分辨率:分辨率越高越好,当前一般可达到最高0.1°
(6)可直接使用车载电源供电,满足车规级温度要求
(7)满足车规级DV和PV测试要求
3、固态激光雷达的点云质量问题
在实际驾驶场景,高反射率物体十分常见,比如交通指示牌,激光雷达对其反射回来的高强度回波非常敏感,容易在点云中形成"鬼影"和"膨胀"。当一个真实高反物体进入激光雷达视场的任一区域时,输出的点云除了在该高反真实位置有成像以外可能在其他方位也会成像一个形状大小类似"鬼影"。在不同场景中,不同类型激光雷达"鬼影"的行踪可能各不相同。
"膨胀"现象通常表现为一个正常高反指示牌的点云轮廓会向四周扩散,成像出来一个比真实物体更大的点云形状,且多出来的点云部分的反射强度表现会偏低。(图2至图8来源:速腾聚创)

图2 固态激光雷达的"鬼影"现象
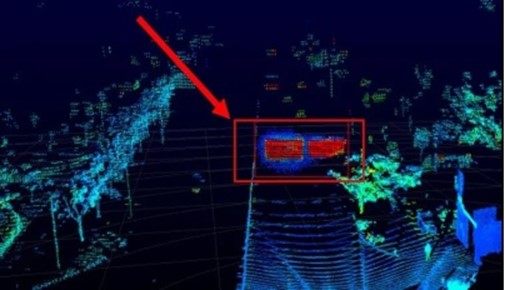
图3 固态激光雷达的"膨胀"现象
近场障碍物的探测能力在智能驾驶中的用处也非常明显,比如在拥堵跟车(TJP)功能中,激光雷达的最近探测距离值越小,跟车距离可以缩得越短,被加塞的可能性就越小。
然而,中长距激光雷达探测在探测近距离物体时会出现"吸点"(测距不准)和"空洞"(测不到)现象,在出现以上两类问题的小区域通常会被设定为"盲区",输出的点云数据不建议使用。
"空洞"描述的是激光雷达对于近场低矮障碍物的探测在从远到近过程中"时有时无"的丢失现象。障碍物原始点云"时有时无"会让感知算法难以连续跟踪,这容易导致智能驾驶的急刹车或频繁"减速加速"顿挫。

图4 固态激光雷达"吸点"现象
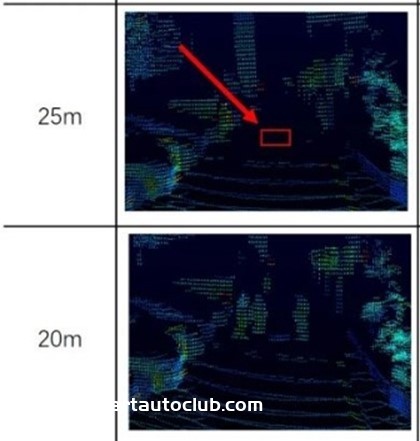
图5 固态激光雷达"空洞"现象
4、固态激光雷达的发展趋势
现在使用的大部分激光雷达都是一维电机扫描架构,这类延用了十余年的一维电机扫描架构,激光收发单元在出厂前被完全固定,导致扫描线束分布和最高帧率会在出厂的时候就被固定。
后续固态激光雷达会出现二维MEMS扫描功能,可以任意改变横向和纵向的扫描速度从而改变扫描形态,且在收到指令后的下一帧即可完成切换。线数分布可以任意变换,激光雷达可基于不同驾驶场景自由调节ROI区域的角度范围、分辨率大小。
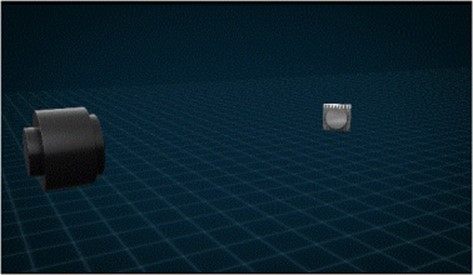
图6 二维MEMS空间扫描阵列图
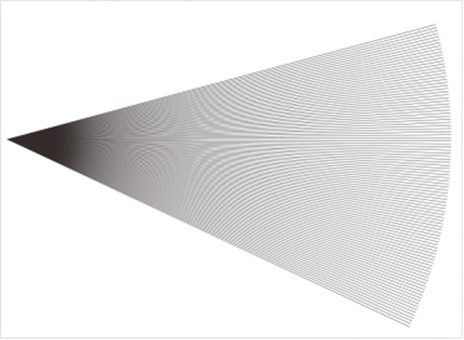
图7 二维MEMS扫描阵列图
智能驾驶系统在高速上实现HWP(Highway Pilot)功能,需要获得对上述障碍物的更远有效检测距离,这要求激光雷达拥有高测距能力,以及高有效分辨率(即障碍物所在的ROI区域内的高分辨率)。智能提升ROI区域垂直分辨率,障碍物点云成像密度翻倍,对前方小物体高度准确测量,提前进行决策。在直行道路上,提升垂直分辨率,意味着感知算法对车辆的识别距离可达到更远(可达200m),对静态小型障碍物的检测距离也可以更远(可达160m),对于驾驶时速120km/h行驶的智能驾驶车辆而言,这是从安全制动距离到舒适制动/变道距离的质变,有效提升车辆的安全性和驾驶舒适性。
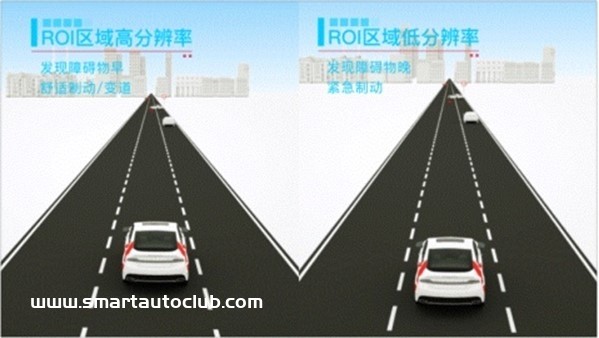
图8 ROI区域高分辨率差别示意图
5、总结
随着自动驾驶技术的发展和传感器硬件技术的更新,固态激光雷达未来会大批量的搭载到量产车型中以满足车规级自动驾驶的要求。
来源:北京市高级别自动驾驶示范区 作者:程增木
Welcome to join us.Aibang lidar industry communicationThere are currently 2,700 people, including relevant persons in charge from major lidar manufacturers and OEMs. Click on the tags below to filter
Lidar OEM Autonomous Driving application terminal laser VCSEL light detector sensor Optical element Optical module filter Galvanometer Optical components radome cover adhesive Electronic component semiconductor chip tier1 Parts Non-standard automation Hardware circuit board motor Coating Coating equipment Plastic Products vehicle electronics Surface treatment auto parts equipment Testing Equipment Connector plastic Material software trading acting College graduate School other
Download: