
-
机械激光雷达
实例分析Valeo SCALA I, SICK LMS291, Velodyne HDL-64E, Livox(DJI) MID-70几款激光雷达,机械激光雷达特点是通过电动执行器带动镜面,透镜或者机体旋转进行扫描。
Valeo SCALA I
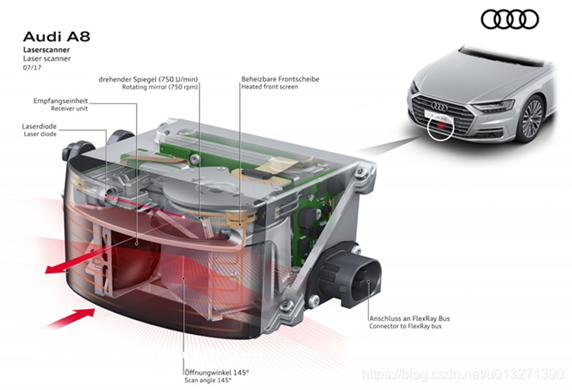
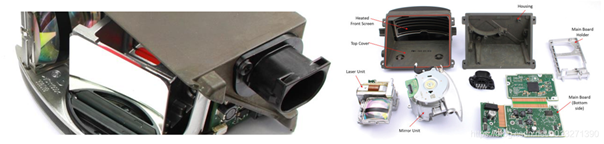
利用多边体镜面反射光束,并由电机带动高速旋转。当几个镜面角度不一样时,可以发射出几道光幕。工作原理:
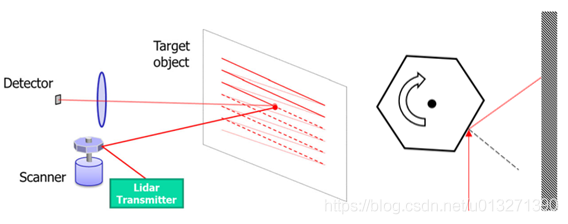
SICK LMS291

一个比较古老的型号,但是工作原理比较典型,SICK的其他系列和型号也在应用。
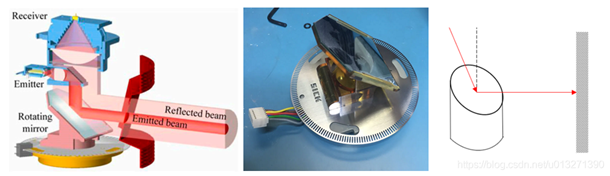
电机带动与发射激光的方向有一定角度的一个镜面旋转,通过镜面反射光线。一个电机只能控制镜面发射出一个平面上的光线,即一道光幕。
Velodyne HDL-64E

Velodyne的64线激光雷达,电机带动整个机体旋转。
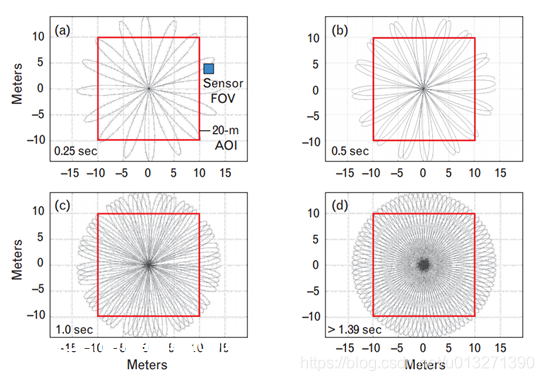
Livox MID-70

采用的是Risley prism的光学scanner设计
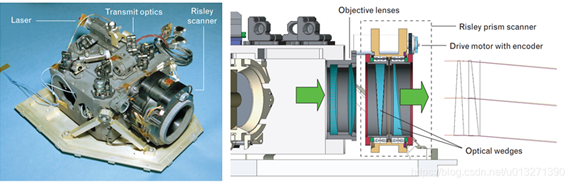
通过旋转前面两个厚度不均匀的透镜,发射出的激光是这样的:
以上即是几种机械激光雷达的实现方式
版权声明:本文为CSDN博主「Clint_Sun」的原创文章
原文链接:https://blog.csdn.net/u013271390/article/details/113784735
-
MEMS激光雷达
与传统机械雷达相比,MEMS (Micro-Electro-Mechanical Systems) 激光雷达使用微型的MEMS mirror反射光线,用微机电执行器代替电机,有些厂商也称MEMS激光雷达为固态雷达。
以Leddar Tech的MEMS激光雷达模块为例,
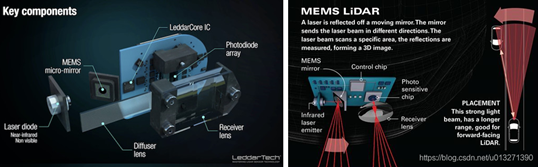
另外一个示例
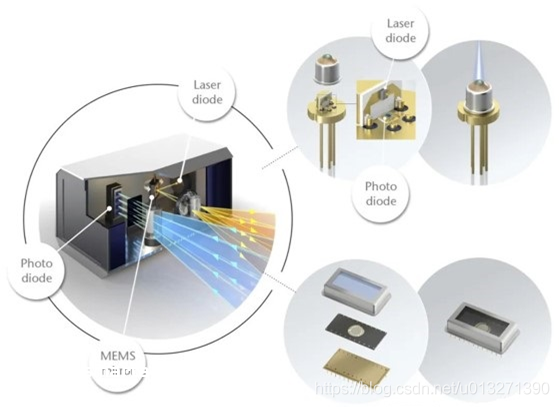
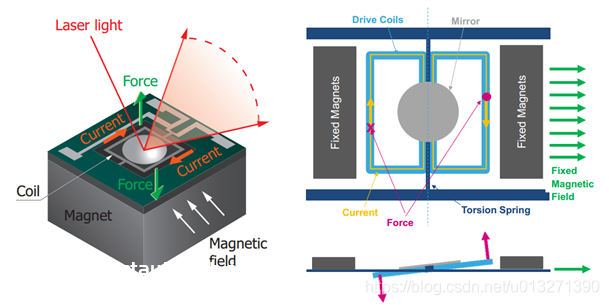
MEMS micro-mirror有电磁式Electro-Magnetic,压电式Thin-Film Piezo,静电场式 Electrostatic 几种实现方式。
电磁式Electro-Magnetic,
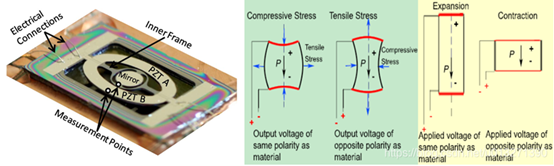
压电式Thin-Film Piezo,
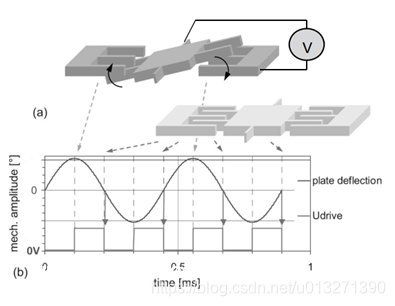
静电场式 Electrostatic,
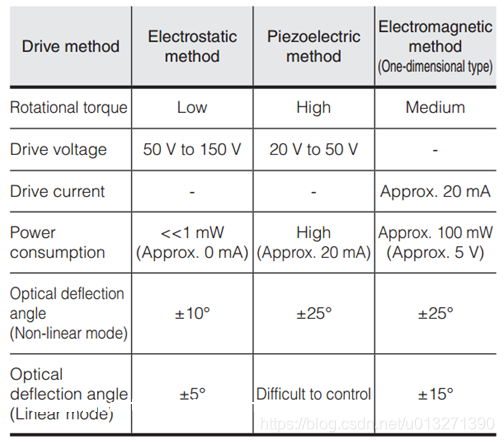
三种类别的特性对比如下
MEMS mirror在一些消费品电子像AR眼镜上也有应用。
版权声明:本文为CSDN博主「Clint_Sun」的原创文章
原文链接:https://blog.csdn.net/u013271390/article/details/113808583
-
固态激光雷达 (Flash LiDAR)
固态激光雷达分为Flash LiDAR和OPA (Optical Phased Array) LiDAR,Flash LiDAR是非扫描式的,OPA LiDAR 是扫描式的。Flash LiDAR的发射光源和接收部件都是阵列式结构。
Leddar Tech的Flash LiDAR模块,
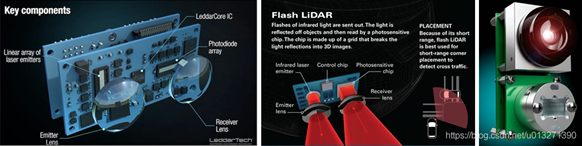
Linear array光源从上至下依次点亮,形成一个点阵面。
Ibeo的方案,

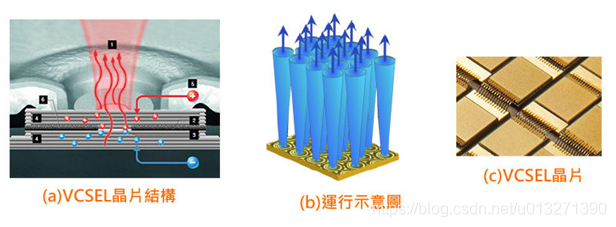
发射光源为VCSEL,128列 x 100行,接收部件为SPAD。
VCSEL内部结构,
SPAD内部结构,

因为是阵列式光学发射和接收部件,可以不必再使用电机或者MEMS mirror等scanner 即可3D成像。

版权声明:本文为CSDN博主「Clint_Sun」的原创文章
原文链接:https://blog.csdn.net/u013271390/article/details/113810068
-
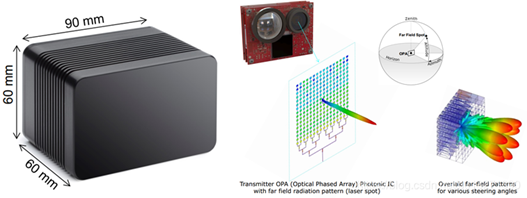
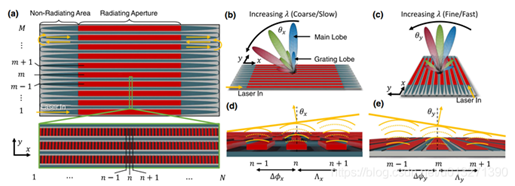
相控阵激光雷达 (OPA LiDAR)
OPA LiDAR相控阵激光雷达的技术核心是OPA scanner。Quanergy S3激光雷达Transmitter OPA:
Leddar Tech OPA LiDAR模块:
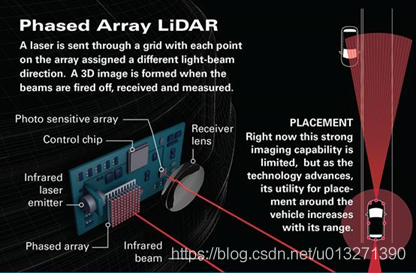
相控阵Phase array实现方式:
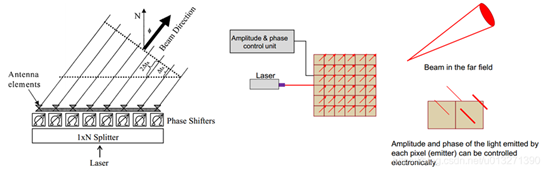
Phase array/ Emitter/ Antenna结构:
————————————————
版权声明:本文为CSDN博主「Clint_Sun」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/u013271390/article/details/113811071
Welcome to join us.Aibang lidar industry communicationThere are currently 2,700 people, including relevant persons in charge from major lidar manufacturers and OEMs. Click on the tags below to filter
Lidar OEM Autonomous Driving application terminal laser VCSEL light detector sensor Optical element Optical module filter Galvanometer Optical components radome cover adhesive Electronic component semiconductor chip tier1 Parts Non-standard automation Hardware circuit board motor Coating Coating equipment Plastic Products vehicle electronics Surface treatment auto parts equipment Testing Equipment Connector plastic Material software trading acting College graduate School other
Download: