
欧司朗感知激光雷达平台
欧司朗公司正致力于研发首个可变视角的固态激光雷达(LiDAR)平台,该平台的设计理念将工业化生产和车规认证置于首位。作为二级供应商,我们计划为OEM(主机厂)、一级供应商和系统集成商提供一个可灵活适应其具体应用的中远距离平台

欧司朗感知平台的独特之处有哪些?
我们的目标是:本平台定价面向大众市场,高度注重车规认证和可工业化生产
灵活可调:可根据您的具体应用或安装位置进行调整
采用先进的多击响应功能:多击响应功能可探测距离接近的多个物体
即时探测距离和视场(FoV)调节:可变视场技术可以使模组适配多种应用。
表面差异性探测:通过直接幅度测量法测量反射率反馈。
精准感知:为感知算法优化的确定性扫描方式
针对多传感器融合进行优化:原数据对摄像头兼容,有助于针对早期融合做优化。
距离精度高:使用数字化信号探测以提高精度
基于905纳米侧发光激光器的感知平台,将会具有集成化程度高的优点和面向大众市场的价格。我们的目标是在不改变系统核心部件的前提下,通过升级光学部件及软件来服务于中远距离的应用。
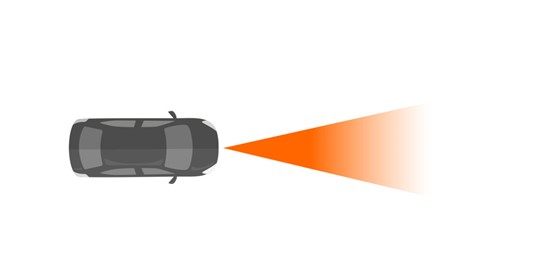
远距离感知激光雷达
距离达200米
狭窄视场(FoV)
适用于高速公路驾驶
常规集成于风挡玻璃或保险杠处
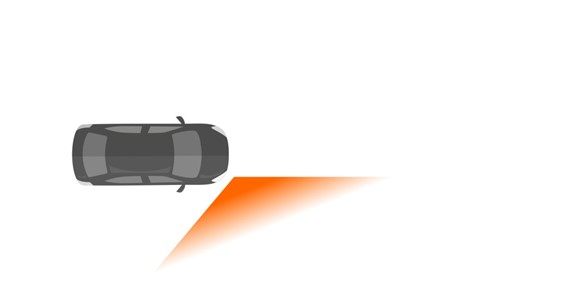
中距离感知激光雷达(LiDAR)
距离可达100米
拥有超广视角(FoV)
适用于城市道路驾驶
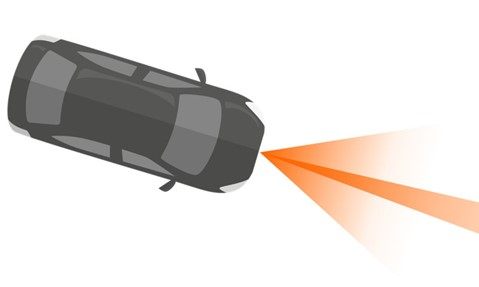
瞬时射程和视图调整
借由一种新型的波束控制方法,仅使用一套欧司朗激光雷达(LiDAR)即可代替多个激光雷达以应对不同环境。这样可以减少客户ADAS功能的总体系统成本。例如,在城市中驾驶汽车时,设置较宽的120°视场角(FoV)即可获得适当的视觉感知范围。在高速公路上行驶时,视场角(FoV)可以自动调整,以监控250米范围内的较小关注区域。
激光雷达是什么?
激光雷达是一种利用不可见激光束精确测距的技术。通过测量视场中数以千计的点的距离,可生成三维点云数据。
这些数据经过处理后可用于自动驾驶和驾驶辅助系统,如高速公路驾驶导航或主动巡航控制等,以便于检测、分类和跟踪车辆行驶周遭的物体。通过将数据或检测到的物体与其他传感器(如摄像头或毫米波雷达)的数据融合,可以生成一个车辆行驶环境中的高精度数字映射。
激光雷达传感器已应用于汽车领域多年,但一直没有实现大批量生产。而现在基于固态激光雷达技术的感知平台降低了生产的复杂性,为主机厂将激光雷达大规模应用提供契机。此外,本感知平台采用创新的光束偏折技术,仍旧可以保持不同的驾驶情况及应用下的灵活性。结合欧司朗在工业化和汽车生产规模化方面的优势,我们预计会极大的降低成本,从而会带来极高的竞争优势。
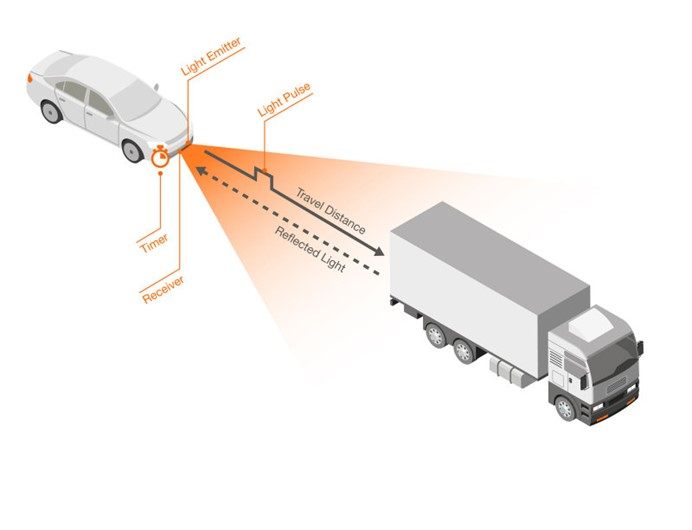
飞行时间激光雷达
飞行时间(ToF)是一种用来测量传感器与物体之间的距离的方法。信号发射后会被物体反射,根据这一过程中获取的从发射到反射回传感器期间的时间差,可得到物体间距离。使用飞行时间(ToF)来测距是目前技术最成熟的激光雷达实现方式。主流的调制方式有三种:欧司朗感知平台是基于脉冲发射的方式运作的,即发射出一个激光脉冲,一部分激光脉冲从物体上反射回来;靠近发射器的探测器提供光信号反射回来的时间;根据以上数据可以计算出物体间距离。其主要优点是结构简单,稳定性和可靠性强,可用元器件广等等。
欢迎加入激光雷达产业链微信群

Welcome to join us.Aibang lidar industry communicationThere are currently 2,700 people, including relevant persons in charge from major lidar manufacturers and OEMs. Click on the tags below to filter
Lidar OEM Autonomous Driving application terminal laser VCSEL light detector sensor Optical element Optical module filter Galvanometer Optical components radome cover adhesive Electronic component semiconductor chip tier1 Parts Non-standard automation Hardware circuit board motor Coating Coating equipment Plastic Products vehicle electronics Surface treatment auto parts equipment Testing Equipment Connector plastic Material software trading acting College graduate School other
Download: