
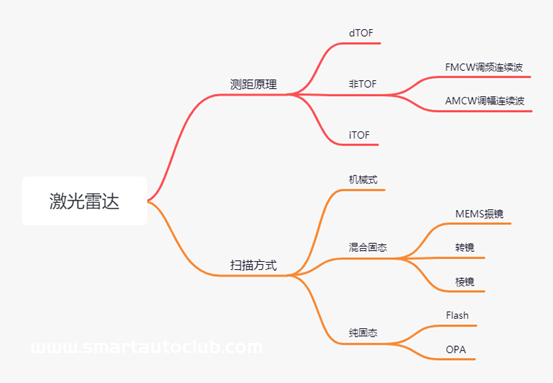
根据测距方法的差异,激光雷达主要分为飞行时间测距法、相干测距法以及三角测距法。目前,激光探测的两种主要技术是ToF与FMCW。ToF激光雷达是目前主流的测距方式,发展较为成熟,在激光雷达传感器领域应用多年。
12月15日,艾邦智能汽车俱乐部在苏州举办了2021年激光雷达创新技术及产业链高峰论坛,在本次论坛上瑷镨瑞思光学有限公司中国区总监金丰从公司介绍、激光雷达技术及需求、激光雷达行业痛点、激光雷达解决方案等几个方面给大家详述了ToF传感器在激光雷达中的应用。今天带大家回顾一下金丰总监的精彩演讲。

-
TOF发展历程
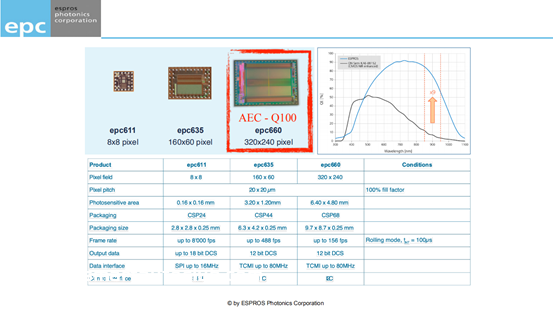
瑷镨瑞思光学在2006年就开始了TOF的技术研发,与其他厂商不同的是2006年到2012年只打磨了底层的工艺,12年基于该工艺研发了第⼀款iToF芯⽚(8*8 Pixel),2015年成为业界第一个量产QVGA iToF芯⽚(320*240 Pixel)的企业,2016到2020年成功的开发出了车规级dToF芯⽚,目前该芯片为客户定制,不能对外销售。

从2015年到现在,公司对iTOF和dTOF两个产品进行了技术升级,目标市场主要是汽车激光雷达,iTOF芯片产品已过车规,明年的Q3会发布一款车规级的dTOF面阵图像传感器。
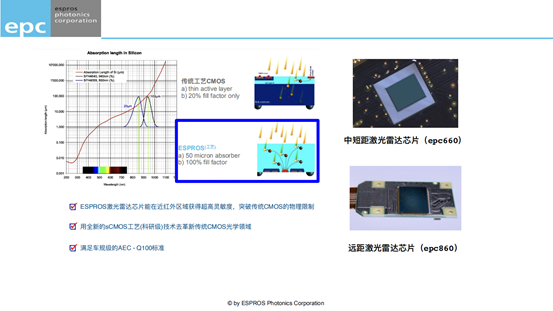
目前公司有3款可量产车规级iTOF芯片,三款产品的区别主要是分辨率。其中epc660是目前全球能过车规级AEC-Q100为数不多的产品之一,该产品在今年年初过的车规级验证,明年Q2将会让epc635拿去做车规验证。
-
激光雷达市场及需求浅析
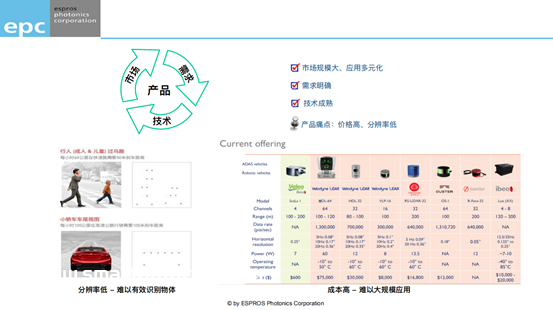
作为汽车的核心探测器,可以把激光雷达分为两大部分,以自动驾驶前装或Automotive领域的应用。在近1~2年,一些产品对激光雷达的价格不敏感以及对验证要求没那么苛刻,所以很多激光雷达的应用案例是在非汽车上。综合来看,激光雷达不仅仅是在汽车上的应用,在其他方面的应用也是一个不错的市场。
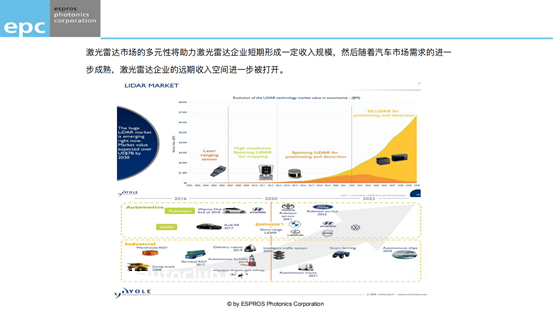
2015年,激光雷达技术被带入了人们的视野之中,人们那时对激光雷达的期许很高,但随着实际应用的发展,发展激光雷达也有其应用的局限性,所以在18~19年是有些激光雷达企业比较困难的,随着激光雷达真正的需求爆发,激光雷达技术的成熟,激光雷达的应用需求明确,目前激光雷达处于起量的节点。
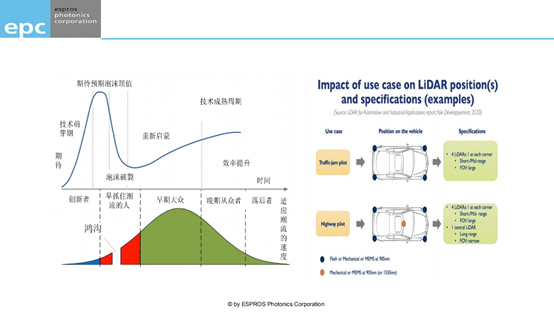
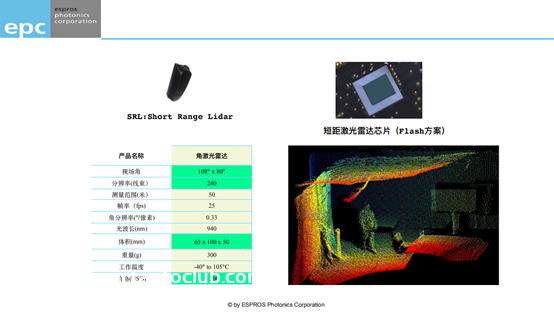
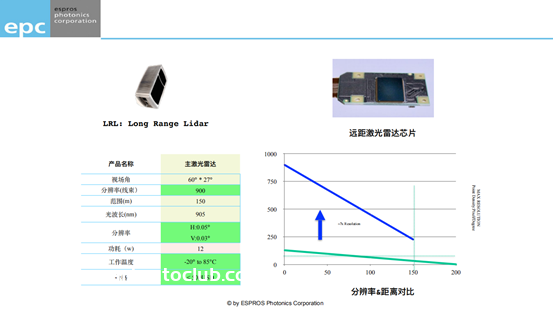
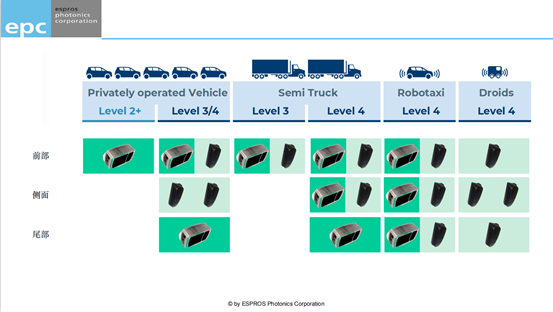
目前主机厂对汽车激光雷达在汽车上的需求形态较为明朗,主要分为前向(主)激光雷达和角激光雷达。前向激光雷达主要考量的指标在于测量范围、帧率、角度等,角激光雷达测量范围不需要很广但在成本上要求不能太过昂贵。作为探测器厂商瑷镨瑞思光学从市场的角度出发,针对主激光雷达和角激光雷达推出了相应的探测器。
虽然目前激光雷达的需求已经起来,技术相对比较成熟,但是由于成本以及分辨率,激光雷达还是未能大批量的应用。
-
不同TOF传感器在激光雷达中的产品形态
针对市场的需求瑷镨瑞思光推出了中短距激光雷达芯⽚(epc660)和远距激光雷达芯⽚(epc860)。中短距激光雷达芯⽚(epc660)是应用在已过车规的320*240 Pixel的图像传感器产品,是一个纯固态的Flash方案。
-
案例分享
虽然只有两个产品,但在未来都可以匹配这些不同场景的应用需求,目前应用工最多的还是在无人配送车方面,京东、美团、阿里等已经全面布局无人配送车,解决最后一公里的配送问题。目前这些无人配送车搭载的是两个16线机械激光雷达,成本和寿命有受一定限制。

Welcome to join us.Aibang lidar industry communicationThere are currently 2,700 people, including relevant persons in charge from major lidar manufacturers and OEMs. Click on the tags below to filter
Lidar OEM Autonomous Driving application terminal laser VCSEL light detector sensor Optical element Optical module filter Galvanometer Optical components radome cover adhesive Electronic component semiconductor chip tier1 Parts Non-standard automation Hardware circuit board motor Coating Coating equipment Plastic Products vehicle electronics Surface treatment auto parts equipment Testing Equipment Connector plastic Material software trading acting College graduate School other
Download: