
作者:德高行知情郎,
知情郎·眼|
侃透天下专利事儿
今天,知情郎聊聊无人驾驶领域的大厂经典专利。
先看下融资情况,据集度官微消息,百度和吉利汽车向智能汽车制造商集度JiDU投资近4亿美元,计划在2023年开始量产。
之前1月18日,百度官方微博发布视频,集度JiDU品牌,集度汽车机器人品牌标志"Pixel—J"官宣诞生。
"集度"(Pixel-J)品牌含义为"集百度AI能力之大成"!
01蔚来都能混出头,百度为啥不能!
集度,大家都不陌生,之前百度为此造势很久了!说白了,蔚来这帮人都能混出头,凭啥百度不能!
2021年1月11日,百度宣布正式组建一家智能汽车公司,以整车制造的身份进军汽车行业,并且吉利集团出资成为新公司的合作伙伴。
2021年3月2日,百度造车正式落地,完成集度汽车公司注册,注册资本20亿元人民币,由夏一平担任CEO。
百度和吉利,双方将基于吉利最新研发的全球领先纯电动架构——浩瀚SEA智能进化体验架构,在智能汽车制造相关领域展开紧密合作,共同打造下一代智能汽车。
在2021年百度第三季度财报投资人会议上,百度董事长李彦宏表示,集度首款概念量产车型的全尺寸油泥模型已完成了风洞测试,将在2022年北京车展亮相并向市场首次展示其智慧座舱和智能驾驶的能力,预计将会在2023年实现大规模量产交付。
在德高行全球专利数据库检索得知,集度汽车公司有15件申请在审中的专利,都尚未授权。
刚成立1年的公司,可以理解。
以智能驾驶等关键词检索,百度1537件中国专利,吉利 260件中国专利。
下表为集度汽车公司的未授权专利,大家可以看看集度的研发方向。
标题
摘要
公开(公告)号
一种空调出风控制方法、系统、车辆及存储介质
本发明实施例公开了一种空调出风控制方法、系统、车辆及存储介质。本发明实施例提供一种温度控制方法,应用于车辆,车辆包括多个温度调节装置,至少存在两个温度调节装置的位置不同,该方法包括确定每个温度调节装置对应的目标对象;根据目标对象的至少两个生命体征,确定目标对象对应的温度调节参数;基于每个温度调节参数运行温度调节装置。本发明实施例提供的技术方案使得与目标对象所在的位置对应的温度调节装置,可以输出匹配目标对象的需求的温度调节参数,使得目标对象可以就近且较快的感受到温度调节装置对车内空气的调节,根据不同的目标对象的偏好和需求运行温度调节装置,较好地满足驾乘人员的舒适度需求。
CN113942367A
电动车辆有序充电控制方法、装置、系统及存储介质
本发明实施例公开一种电动车辆有序充电控制方法、装置、系统及存储介质。该方法包括响应于目标用户选择的有序充电指令,获得目标用户的补能需求;根据目标用户的补能需求与补能电荷负荷分配信息确定有序充电计划;根据有序充电计划控制目标充电设备对目标车辆进行有序充电。本发明实施例提供的技术方案通过为预设区域内的目标车辆分配智能化的有序充电计划,满足预设区域内目标车辆的充电需求,均衡预设区域内电网的峰谷时段负载,平衡了电网负荷,降低了目标用户的充电费用。
CN113910963A
电动车辆续航的方法、装置、电动车辆、设备和存储介质
本发明实施例公开了一种电动车辆续航的方法、装置、电动车辆、设备和存储介质。该电动车辆包括动力电池,动力电池的电池容量包括可用电量和保护电量,该电动车辆续航的方法包括:获取动力电池的可用电量;在确定可用电量小于或等于低电量阈值时,激活保护电量续航。本发明实施例的技术方案通过获取动力电池的可用电量,判断可用电量与低电量阈值的大小关系,进而触发低电量激活提醒指令,在车辆用户外部输入同意激活保护电量的指令后,车机生成低电量激活信号,用于给电动车辆续航,从而可有效应对动力电池耗尽导致的电动车辆抛锚的紧急情况,缓解车辆用户的续航焦虑,并且减小了对车辆用户行车安全造成的安全隐患。
CN113910981A
一种车辆控制方法、装置、电子设备、车辆及存储介质
本发明实施例公开了一种车辆控制方法、装置、电子设备、车辆及存储介质。其中,该方法包括:响应于第一指令,获得目标对象的移动信息,所述第一指令用于指示所述车辆的照明模式为移动照明模式;基于所述目标对象的移动信息,控制所述车辆移动;控制所述车辆的照明范围覆盖目标区域,所述目标区域是根据所述目标对象的移动信息确定的。实现车辆对用户的精准灯光跟随,提升用户体验。
CN113911025A
一种后视镜调整方法、装置、设备及存储介质
本发明公开了一种后视镜调整方法、装置、设备及存储介质。该方法包括:接收驾驶员后视镜调整指令;获取车辆状态信息和驾驶员姿态信息,其中,车辆状态信息包括以下至少一项:车速、后视镜状态;驾驶员姿态包括以下至少一项:驾驶员头部状态和驾驶员眼部状态;当车速小于车速阈值,且车辆处于后视镜调节状态时,根据车辆状态信息和驾驶员姿态信息对车辆后视镜进行调整,后视镜调整包括以下至少一项:后视镜折叠调整、后视镜角度调整。通过本发明的技术方案,能够解决机械式组合开关调整后视镜成本较高且控制逻辑较为复杂和触控屏幕开关调整后视镜其控制界面及逻辑较为复杂导致用户操作体验欠佳的问题,提高了行车的舒适性、安全性及智能性。
CN113895357A
一种驾驶设备控制方法、装置、设备以及存储介质
本发明公开了一种驾驶设备控制方法、装置、设备以及存储介质,属于车辆控制技术领域。该方法包括:根据第一驾驶设备的目标位置信息,获取与所述目标位置信息对应的虚拟对象,所述虚拟对象是第二驾驶设备基于相同的所述目标位置信息设置的;若识别到所述第一驾驶设备的状态信息满足所述虚拟对象的触发条件,则控制所述第一驾驶设备执行所述触发条件对应的控制指令;所述第一驾驶设备的状态信息包括所述第一驾驶设备的实时位置信息、行驶行为信息和行驶环境信息中的至少一项。通过上述技术方案,引入虚拟对象,通过控制驾驶设备执行虚拟对象对应的控制指令,提高了用户在驾驶过程中的趣味性。
CN113895375A
车辆的前舱盖控制方法、装置、系统、设备以及车辆
本申请提供了一种车辆的前舱盖控制方法、装置、系统、设备以及车辆,方法包括:在车辆的蓄电池处于亏电状态下,车辆的中央网关通过外接电源供电;在中央网关处于通电状态下,向前舱盖的控制模块发送控制信号;控制信号用于控制前舱盖开启。该方法通过引入外接电源启动中央网关,解决了现有技术中车辆的蓄电池出现亏电状况时无法可靠的开启车辆的前舱盖的技术问题,实现了在车辆亏电状况下能够可靠的开启车辆的前舱盖的技术效果。
CN113895384A
一种自动泊车方法、系统、终端及存储介质
本发明实施例公开了一种自动泊车方法、系统、终端及存储介质。该方法包括响应于针对目标车辆触发的目标车位选定指令,控制车辆投射车辆投影,车辆投影用于表征目标车位的位置信息;基于车辆投影,控制目标车辆到达目标车位。本发明实施例提供的技术方案通过车辆投射表征目标车位的位置信息的车辆投影,为车辆提供以车辆投影为边界的实际待泊车位,提高车辆进行自动泊车的准确性,解决了车辆存在对非标准车位不能进行自动泊车的问题。
CN113895429A
一种会车方法、装置、车辆及计算机可读存储介质
本发明公开了一种会车方法、装置、车辆及计算机可读存储介质。该方法包括:获取目标会车区域,目标会车区域包括车道通行区域和辅助通行区域,辅助通行区域为与车辆所在车道相邻的非车道区域;根据目标会车区域,规划会车路径。通过上述方法,能够有效提高车辆会车的安全性。
CN113895438A
车辆驾驶行为的管理方法、装置、车辆及存储介质
本申请提供车辆驾驶行为的管理方法、装置、车辆及存储介质,应用于车辆,车辆包括:中控显示屏,展示有包括3D地图导航的基础行驶界面,该方法包括:在自动驾驶状态下,根据车辆的预期驾驶行为,计算预期驾驶行为中驾驶行为变更的关键节点;显示表示关键节点的节点图形,节点图形放置于3D地图导航内驾驶行为变更的路面位置处。利用该方法,实现了对车辆预期驾驶行为中出现驾驶行为变更的变更位置处所对应关键节点的可视化呈现,能够使车内人员通过所展示的关键节点来提前掌握行车动态,还能够使车内人员直观正确的判断车辆是否继续适合车辆自动驾驶状态,以此来规避行车安全隐患,提升车内人员对车辆自动驾驶能力的信任度。
CN113895458A
车辆转向比的调整方法、装置及存储介质
本申请公开了一种车辆转向比的调整方法、装置及存储介质,涉及车辆转向技术领域,该方案解决了现有的线控转向系统中需要反复调试转向比的技术问题,从而改善了用户体验。该方法包括:接收驾驶员对方向盘的转向操作,获取第一方向盘转角极值;基于第一方向盘转角极值,结合前轮转角极值与工况的对应关系,确定转向比与工况的对应关系;在车辆行驶过程中,基于转向比与工况的对应关系,根据车辆的工况调整车辆的转向比。
CN113895518A
一种车辆控制方法、装置、移动终端及存储介质
本申请公开了一种车辆控制方法、装置、移动终端及存储介质;该方法包括:接收第一指令,第一指令用于打开第一应用程序;响应于第一指令,获取移动终端与车辆之间的近场通信连接的状态;当移动终端与车辆之间的近场通信连接的状态为已连接状态时,显示第一应用程序中的第二页面;其中,第二页面中包括一个或多个控件,该控件可被选择,响应于该选择,经由近场通信连接发送对应于控件的控制指令。本申请可以更加准确地猜测到用户通过近场通信实现对车辆进行控制的意图,更加贴合用户的实际使用需求,提升用户使用体验。
CN113891284A
一种自动驾驶方法及自动驾驶系统及自动驾驶汽车
本发明涉及自动驾驶技术领域,具体公开了一种自动驾驶方法及自动驾驶系统及自动驾驶汽车,该自动驾驶方法包括通过地图定位模块进行线路的规划;自动驾驶环境监测模块通过环视摄像头组件、激光雷达、前视摄像头、侧后视摄像头组件、角雷达组件和超声波雷达组件的配合使用可在车体四周实现无死角探测。控制器根据地图定位模块的路径规划信息和自动驾驶环境监测模块探测的实时路况信息调取相应的场景控制逻辑。该方法及相应的自动驾驶系统及自动驾驶汽车兼顾了实现高级别自动驾驶功能和传感器模块成本控制,而且该设计在满足高级别自动驾驶性能要求的同时,使用了最少的雷达及摄像头,较少的传感器数量解决了由于价格昂贵无法进行商业推广的问题。
CN113734196A
一种自动泊车方法、汽车及存储介质
本发明公开了一种自动泊车方法、汽车及存储介质。该方法包括:在车辆满足预设条件时,获取停车场列表,其中,预设条件为车辆行驶至目的地位置、且开启第一类型的自动代客泊车AVP模式;设定停车场列表中的第一个停车场为目标停车场,并获取目标行车路线;根据目标行车路线自动行驶至目标停车场,并判断目标停车场是否能成功泊车;若判断结果为是,则根据第一类型的AVP模式进行泊车,并向终端设备发送成功泊车信息;若判断结果为否,则设定停车场列表中的下一个停车场为目标停车场,并返回执行获取目标行车路线的步骤,直至成功泊车或者停车场列表中不存在下一个停车场为止。本方案能够有效解决泊车难的问题。
CN113665565A
车外环境显示方法和装置、车辆、设备和存储介质
本发明公开了一种车外环境显示方法和装置、车辆、设备和存储介质。该方法包括:获取车外环境的图像信息和激光雷达信息;根据图像信息和激光雷达信息进行融合形成车外环境信息;根据车外环境信息确定有效目标物的状态,并进行显示。车外环境信息中的激光雷达信息不仅能够对图像信息中的目标物进行数据补充,提高显示过程中有效目标物的状态的准确性,进而提高对驾驶员的指导作用。而且能够在车外环境恶劣图像信息显示不清晰时补充图像信息,完善图像信息中有效目标物的类型,避免光线不足的影响反映有效目标物的状态,从而可以提高在车外环境恶劣的情况下显示有效目标物的状态的准确性,为驾驶员提供操作指导信息,降低了驾驶员操作车辆的困难。
CN113459951A
02百度无人驾驶经典专利解读
作为国内最强的无人驾驶技术路线代表-百度,知情郎来解读下它的经典专利。
聊一聊近期百度公布的无人驾驶方面的专利,CN112572418A,公开日2021年03月30日。
该专利应用场景是专门解决无人驾驶的车辆如何停车的问题。
很好理解,随着无人驾驶技术的不断发展,无人驾驶车辆例如无人驾驶公交车和无人驾驶出租车等越来越多,也越来越智能。
无人驾驶车辆在行驶过程中,往往都是根据定位有固定的停车点位(例如,无人驾驶公交车程有固定的停车点位),在到达固定的点位时直接停车,或者根据无人驾驶车辆中的乘客输入的指令直接停车。
问题来了,未来,无人驾驶的车辆要自主决定是否停车,停在哪个位置,不靠人判断,靠机器自己判断停车点是否合适停车,就有难度了。
因为哪怕是预设了停车点,但那场地周围路况复杂,停车位附近人流、车流不断,未必适合直接停车,究竟什么情况下才能安全停车,需要具体判断当地情况而定。
这还是预设停车点的情况,如果没有预设停车点,开到哪想随时停,这情况处理起来就更复杂了。
百度的工程师想了一种方式,来提高无人驾驶车辆判断停车点是否可停靠的智能化程度。

03步骤一,拍照获取路面情况!
要判断自然先要有第一手的实时信息。
所以,第一步,还是获取信息。
当无人驾驶车辆到达停车预设位置时,或者,接收到停车指令时,可进行停车的准备。
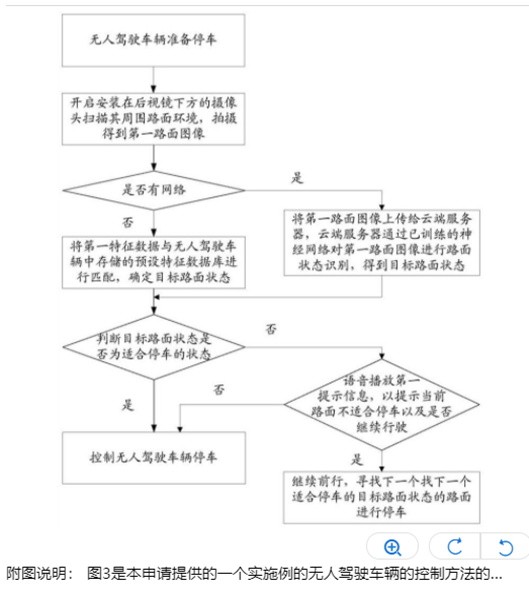
至于是否停车,需要获取无人驾驶车辆上与车门位于同侧的摄像头在当前位置拍摄的第一路面图像,并根据后续检测的路面实际情况确定。
摄像头如何摆拍?
无人驾驶车辆外设置有多个摄像头,且摄像头与车门位于同侧,以便于拍摄无人驾驶车辆设有车门的一侧或两侧的路面图像。
摄像头会持续拍照,将一组组实时路况图像信息传回,处理器会对路面图像进行路面识别,路面识别结果可包括适合停车的路面或不适合停车的路面。
简单说明下,适合停车的状态对应路面识别结果为适合停车的路面,即路面情况良好,适于停车,即该状态表征路面适于停车,有利于车辆中的乘客下车。
不适合停车的状态对应路面识别结果为不适合停车的路面,即表示路面情况较差,不适于停车,例如,路面有坑、有淤泥、有水、周围情况复杂等,即该状态表征路面不适于停车。
04步骤二
与数据库匹配相似度
识别路面情况
这步骤比较难,涉及到信息数据识别智能程度了。
说白了,把在停车现场拍到的冗杂路面信息清洗提炼一次,取得第一特征数据,即有明确指向性、强关联、含金量高的数据特征。
如何清洗提炼第一特征数据?
有预设的数据库,这个数据库是专门用来存储、分析路面信息特征的,里面含有匹配、判定逻辑。
简单说明下,预设的特征数据库中包括多个路面图像的特征数据,该特征数据与第一特征数据的类型相同(相似度很高),例如,预设特征数据库中路面图像的特征数据包括路面图像的A特征的数据和B特征的数据等,对第一路面图像进行A特征和B特征的提取,则得到的第一特征数据包括第一路面图像的A特征的数据和B特征的数据。
示例下,将第一特征数据与无人驾驶车辆中存储的预设特征数据库进行匹配,确定目标路面状态,可以理解是对第一特征数据与预设特征数据库中特征数据进行相似度匹配,确定目标路面状态。
需要说明的是,上述预设特征数据库中的多个路面图像是在过去的时间里累积的已确定的不适于停车的路面的图像。
也可以将第一特征数据甩到云端服务器数据库,云端服务器通过已训练的神经网络对第一路面图像进行路面状态识别,即识别第一路面图像中的路面是否是好路面(即是否适合停车),得到目标路面状态,将目标路面状态发送给机车,机车接收云端服务器发送的目标路面状态,判断目标路面状态是否为适合停车的状态,在所述目标路面状态为第一路面状态的情况下,即为适合停车的状态,此时,控制无人驾驶车辆停车。
在所述目标路面状态为第二路面状态的情况下,即为不适合停车的状态,此时,可语音播放第一提示信息,以提示当前路面不适合停车以及是否继续行驶,若用户进行第一输入,即选择停止,则控制无人驾驶车辆停车,若用户进行第二输入,即选择继续行驶,则控制无人驾驶车辆继续行驶,寻找下一个适合停车的目标路面状态的路面进行停车。
总体说,这个专利的难点不在于构思,而在于预设的数据库对路面图片内含特征信息的算法判定准确率是否高。
举个简单的例子,预设数据库里的AI模型对于是否适合停车的判断,在常年数据训练下,对道路平整、无积水的倾向性很高,即平整、无水特征浓的地方判定适合停车。
那么,摄像头拍到的照片是车门外侧的路面有坑坑洼洼、有积水的路况,AI模型大概率判定此地不适合停车。
但这种地方其实按照人类司机的判断,是可以停车的,无非乘客下车时,需要自己注意点坑洼的地面,别踩到积水上就是了。
要到乡下农村祭祖游玩,那些公路基础设施较差的地方,路面不都是坑坑洼洼的,不会像城市的道路那般平整。
如果预设的数据库是按城市的道路来设计无人驾驶停车的思路,那么,这车开到路况复杂的农村乡下,怕是会得到大量不匹配停车的机器反馈。
停车逻辑判断树
05另一专利,解决鬼探头视野盲区
另一个百度的专利,公开号CN113753081A,公开日2021年12月07日,该专利涉及自动控制领域,涉及一种激光雷达路侧盲区交通参与者避让方法和装置。
这个专利专门解决激光雷达无法识别障碍物遮挡造成的盲区问题,即预防汽车行驶路线鬼探头问题!
这问题是行业最棘手的!
在无人驾驶车辆中,集成了多类传感器:GPS-IMU(惯性测量单元,InertialMeasurement Unit)组合导航模块、相机、激光雷达、毫米波雷达等传感器。
无人驾驶车辆行驶过程中,主要依靠激光雷达对障碍物进行检测,但是,现有无人驾驶车辆的障碍物检测,只能检测到出现在激光雷达视野中的障碍物,无法检测由于障碍物遮挡造成的盲区中的情况。
换句话说,激光雷达的眼睛只能看到前方障碍物,看不到障碍物身后的东西。
比如"鬼探头",即行人、自行车、车辆、动物等交通参与者突然从其他大障碍物(公交车)遮挡造成的盲区中出现,而无人驾驶车辆只能在识别到交通参与者后才能进行反应,如刹车灯;由于突然出现的交通参与者留给无人驾驶车辆的反应时间有限,即使刹车也可能会发生碰撞,这就增加了突发危险和事故发生的几率。
这个专利构思的技术方案实用性比较大,有不错的参考价值。
06步骤一
准备好软硬件设备
1)行车电脑或车载终端可以控制激光雷达传感器以某一频率采集某一区域的点云数据。无线连接方式可以包括但不限于3G/4G连接、WiFi连接、蓝牙连接、WiMAX连接、Zigbee连接、UWB(ultra wideband)连接、以及其他现在已知或将来开发的无线连接方式。
2)激光雷达的规格可以采用16线、32线或者64线等等。其中线数越高表示激光雷达的单位能量密度越大。
3)本实施例中,装在当前车辆上的激光雷达在每一秒中旋转360次,扫描当前车辆周围一圈的待识别的障碍物的信息,为一帧待识别的障碍物的信息。本实施例中的待识别的障碍物的信息可以包括待识别的障碍物的点云以及待识别的障碍物的反射值。当前车辆周围的待识别的障碍物可以有一个,也可以有多个。激光雷达扫描之后,可以以当前车辆的质心位置为坐标系的原点,并取平行于水平面的两个方向分别为x方向和y方向,作为长度方向和宽度方向,垂直于地面的方向为z方向,作为高度方向。然后可以根据待识别障碍物的点云中的每一个点与原点的相对位置和距离,在坐标系中标识待识别的障碍物。
4)获取无人驾驶车辆周围的待识别障碍物的信息后,利用预设的点云识别模型对所述待识别障碍物进行识别。所述预设的点云识别模型可以是各种预先训练的能够识别点云数据中障碍物的算法,例如可以是ICP算法(Iterative Closest Point,就近点搜索法)、随机森林算法等。在利用上述点云识别模型识别点云数据中的障碍物后,对识别出的障碍物进行标注,得到标注结果。在对识别出的障碍物进行标注时,标注出的形状可以为与各障碍物外切的最小长方体,也可以是与各障碍物的外表面贴近的不规则曲面。可以理解的是,上述标注结果中包括对各障碍物的识别结果,例如点云数据中包括车辆、交通参与者以及树木,则标注结果中也包括表示不同障碍物的标号或文字,如1代表公交车、2代表小汽车、3代表交通参与者等。
07步骤二:测算路侧盲区
这步比较关键,因为针对的就是盲区鬼探头,突然从前方公交车身后出来一部摩托车抢道闯红绿灯横穿路口,这样导致车毁人亡的事不要太多。
哪怕是个老司机都未必反应的过来。
如何测算路测盲区?
在百度工程师的定义中,路侧盲区一般是由停靠在路侧或行车在无人驾驶车辆的外侧车道的大型车辆,例如公交车、卡车造成的。由于其体积较大,会遮挡激光雷达的扫描,使无人驾驶车辆无法获知其外侧是否存在交通参与者。交通参与者突然从路侧盲区进入无人驾驶车辆所在道路,即使无人驾驶车辆进行刹车,由于刹车距离的限制,很可能仍会与所述交通参与者发生碰撞。
判断当前道路场景是否为潜在碰撞场景,判断标准包括:存在路侧盲区、所述路侧盲区为大型车辆造成、所述大型车辆单独位于道路外侧车道。
优选地,对路侧盲区,一般仅考虑由大型车辆造成的路侧盲区。预设的点云识别模型可以识别对应的障碍物类型和尺寸,以判断所述障碍物是否为大型车辆。
优选地,通过无人驾驶车辆的摄像头等传感器,识别道路车道线,确定所述大型车辆是否位于道路外侧车道。如果判断为停靠与道路外侧车道的大型车辆,则其为到站上下乘客的公交车的概率较大,对于这种情况,很有可能有交通参与者从公交车车头突然进入无人驾驶车辆所在车道(与无人驾驶车辆同向行驶的公交车),或从公交车车尾突然进行无人驾驶车辆所在车道(与无人驾驶车辆相向形式的公交车)。
优选地,若所述大型车辆单独位于道路外侧车道,则认为所述大型车辆前方的路侧盲区中出现交通参与者从车头突然进入无人驾驶车辆所在车道(与无人驾驶车辆同向行驶的公交车),或从公交车车尾突然进行无人驾驶车辆所在车道(与无人驾驶车辆相向形式的公交车)的概率较大。
08步骤三、测算碰撞风险
百度工程师是这样构思的。
假设从所述路侧盲区中出现交通参与者横穿马路,进入无人驾驶车辆的前方,计算所述交通参与者可能出现的范围,包括,所述交通参与者和车辆在当前时刻以及接下来的时刻所处位置。
例如,交通参与者从路侧的公交车下车后,位于公交车遮挡激光雷达造成的盲区中;交通参与者从公交车车头方向出现横穿马路,则无人驾驶车辆扫描并识别到所述交通参与者,进行刹车,但是若如交通参与者出现时与无人驾驶车辆的距离已经小于无人驾驶车辆当前时速的最短刹车距离,则造成碰撞事故。
其中,横穿马路的交通参与者速度我们可以规定为5米/秒,即高于普通人群的一般速度以覆盖大多数人的横穿行为。
计算无人驾驶车辆是否与横穿马路的交通参与者存在碰撞风险,无人驾驶车辆与横穿马路的交通参与者的轨迹交汇,无人驾驶车辆到达交汇点的时间=无人驾驶车辆与交汇点的距离÷无人驾驶车辆速度;交通参与者到达交汇点的时间=交通参与者与交汇点的距离÷交通参与者速度。由于车道宽度为3.5米,则预设的安全阈值假设规定为1秒,即交通参与者可以在1秒之内越过该车道。若无人驾驶车辆到达交汇点的时间与交通参与者到达交汇点的时间的绝对值之差小于或等于1秒,则存在碰撞风险。
例如,无人驾驶车辆与交汇点的距离为100米,无人驾驶车辆的速度为72千米/小时,即20米/秒,到达交汇点的时间为5秒;而交通参与者从路侧盲区到达交汇点的距离为10米,则到达交汇点的时间为2秒;则无人驾驶车辆到达交汇点的时间与交通参与者到达交汇点的时间的绝对值之差大于1秒,则不存在碰撞风险。
例如,无人驾驶车辆与交汇点的距离为60米,无人驾驶车辆的速度为72千米/小时,即20米/秒,到达交汇点的时间为3秒;而交通参与者从路侧盲区到达交汇点的距离为10米,则到达交汇点的时间为2秒;则无人驾驶车辆到达交汇点的时间与交通参与者到达交汇点的时间的绝对值之差小于1秒,则存在碰撞风险。
知情郎插句话,测算碰撞风险的事,完全是数学的领域,系统在不停的测算道路上各个参照物的车速和行人速度。
然后统计行进路线各个障碍物是否会碰撞。
这个逻辑难点在于变量实在太多,太不确定了。
为何?因为无人驾驶的车速度方向可以控制,但前方的其他车辆和人的速度和转向都是不确定的,尤其是横穿马路的行人是最不稳定的参照物,行人的手机电话响了,也许行人就不走路了,突然停在路口接电话了。
更普遍的现象是,前面那卡车明明停在那2分钟没动,原来是司机在抽烟,现在突然动了,司机抽完烟了,如何判断?
09步骤四:根据风险进行减速运动
百度工程师对如何控制减速的技术构思。
因为整个思路是为了避免现有技术中无人驾驶车辆只能对探测到的障碍物进行反应,对于从路侧盲区出现的交通参与者只能采取紧急刹车,但无法避免碰撞风险的情况。
所以百度工程师通过判断路侧盲区出现交通参与者与无人驾驶车辆的碰撞风险,提前控制无人驾驶车辆进行减速,实现了无人驾驶车辆的安全驾驶。
减速技术方案如下:
根据无人驾驶车辆在不同车速下的最短刹车距离,调节无人驾驶车辆的速度,使其最短刹车距离小于无人驾驶车辆与交汇点的距离。这可以绝对保证无人驾驶车辆不会与从路侧盲区出现的交通参与者发生碰撞。
优选地,以预设时间间隔,例如0.1秒,重复执行上述判断和控制步骤;直至无人驾驶车辆驶离所述交汇点。
优选地,若存在多个路侧盲区,则分别计算无人驾驶车辆与从所述路侧盲区中出现的交通参与者的碰撞风险,控制无人驾驶车辆进行减速,以保证无人驾驶车辆不会与所述多个路侧盲区出现的交通参与者发生碰撞。
总体看,这个专利逻辑结构清晰,实用性也不错,提供了一种很简洁的减速思路,不错。
中国的城乡路况结构复杂,到处横穿马路、随地停车随时超车,小摩托小三轮横行霸道,各种岔道弯道纵连。在这种路况情况下,老司机都反应不过来,AI机器判断,太勉强了。
原文标题 : 自动驾驶百度经典专利解读:如何预防汽车盲区鬼探头?
链接:https://nev.ofweek.com/2022-01/ART-77015-8420-30548199.html

Download: