")
本标准适用于安装有全速自适应巡航控制系统(FSRA)的 M1 类汽车,其它类型汽车可参照执行。
下列文件对于本文件的应用是必不可少的。凡是注日期的引用文件,仅所注日期的版本适用于本文件。凡是不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
ISO 2575 Road vehicle—Symbols for controls,indicators and tell-tales(道路车辆—控制、显示和警示符号)
ISO 15622 Intelligent transport systems —Adaptive cruise control systems—Performance requirements and test procedures(智能运输系统—自适应巡航系统--性能要求与检测方法)
UN ECE-R13-H 关于核准乘用车制动性能的统一规定
实时监测车辆前方行驶环境,在设定的速度范围内自动调整行驶速度并具有减速至停止及从停止状态自动起步的功能,以适应前方车辆和/或道路条件等引起的驾驶环境变化.
产生阻碍车辆运动或运动趋势的力(制动力)的过程,分为以下种类:摩擦制动 由车辆上相对运动的两部分产生的摩擦力;
电磁制动--- 由车辆上相对运动但不接触的两部分基于电磁作用产生的电磁力;
液力制动--- 由车辆上相对运动的两部分间的液体运动产生的阻尼力;
发动机制动--- 由发动机的制动作用产生的传递到车轮的制动力。
3.5 自由流交通 free-flowing traffic
车流量大但比较流畅的交通,不包括频繁起步停车和紧急制动的情况。
由驾驶员或由FSRA 系统以外的其他控制系统设定的期望行驶速度,亦即车辆在 FSRA 系统控制下的最高期望速度。
注:可通过开关手动开启或关闭全速自适应巡航各项功能,或上电后自动开启全速自适应巡航各项功能;若有错误反应将强制自动关闭。
全速自适应巡航系统至少提供下列控制策略和状态切换:
4.1.1 当 FSRA 处于工作状态时,本车通过对速度的自动控制来与前车保持一定的车间时距或预先的设定速度(以二者中速度低者为准)。这两种控制模式之间的转化可由 FSRA 系统自动完成。
4.1.2 稳定状态的车间时距可由系统自动调节或由驾驶员调节。
4.1.3 若前方存在多个车辆,系统应自动选择将要跟随的车辆。
e) 本车停止后,全速自适应巡航系统状态应在 3s 内由当前控制模式向保持状态转换完成。
4.1.4 全速自适应巡航系统处于保持状态下,本车的制动系统应自动施加以使车辆保持在静止状态。
FSRA 系统应为驾驶员提供一种用来选择并设定期望车速的方法。同时可以提供给驾驶员选择一种车载装置的设定车速,如交通限速识别系统。
在车间时距控制状态和纵向控制状态时,若驾驶员施加的制动力大于 FSRA 系统的制动力时,驾驶员的制动行为将使FSRA系统失效(切换至FSRA等待状态);在保持状态时,驾驶员的制动行为不能使FSRA系统失效。
FSRA系统不应明显地削弱车辆对驾驶员制动输入的瞬时形影能力(参考 ECE-R 13-H)。即使在 FSRA系统处于自动制动的情况下,也不应明显削弱车辆对驾驶员踏板制动力的动态响应能力。
当驾驶员欲 FSRA 系统均有发动机动力控制(节气门输入)请求时,以二者中大者为准,这将使驾驶员对发动机动力控制的优先权始终高于FSRA 系统。
若驾驶员的制动需求高于 FSRA 系统时,FSRA系统的自动制动力应立即释放。对驾驶员控制加速踏板不应由明显的响应延迟。
自动制动状态对车轮的抱死时间不应超过 ABS 的允许值。FSRA 系统不干涉 ABS。
FSRA 系统的发动机动力控制作用引起的车轮打滑时间不应超过牵引力控制系统的允许值。FSRA 系统不干涉牵引力控制系统。
FSRA系统可适当调整车间时距以适应驾驶环境的变化(如恶劣天气),但被调整后的车间时距不应低于驾驶员的设定值。
若 FSRA 系统允许驾驶员选择期望的车间时距,应采取以下几种方法之一:
a) 若 FSRA 系统关闭后仍存储着最近一次选定的车间时距值,则当系统被再次激活后应将该车间时距值显示给驾驶员;
b) 若 FSRA 系统关闭后不存储最近选定过的车间时距值,则车间时距应被设定为默认值(大于或等于1.5s)。
当驾驶员踩住制动踏板或自动驻车系统工作,保证车辆静止时,驾驶员可激活FSRA 系统。
系统退出或进入待机模式,不能立刻释放制动,应留给驾驶员足够的接管时间,以保证行车安全。
为驾驶员提供最基本的反馈信息,包括 FSRA 系统状态以及设定速度等,并且他们可以组合在一起显示输出,例如仅在 FSRA 系统处于工作状态时才显示设定速度信息,则应向驾驶员提示当前处于工作状态的系统。
若FSRA系统退出或出现故障,应及时提示驾驶员,提示符号应符的规定。
如果车辆同时配备有 FSRA 系统和常规巡航控制系统,则应向驾驶员提示当前处于工作状态的系统。
要求采用信息“探测到车辆”来表示 FSRA 系统已探测到前方有一车辆,可作为控制的参考目标。
若采用符号来标识FSRA 系统的功能和故障状态,应符合GB/T 4782 的规定。
FSRA 系统进行正向加速度操作的前提是车速在最低巡航速度 Vlow 以上,Vlow≥5m/s.
当 FSRA系统正处于自动关闭过程中,并且车辆速度低于 Vlow 时,不允许突然撤销制动力。最低的设定车速应为:Vset_min≥7m/s且 Vset_min≥Vlow。
FSRA 系统的平均减速度不应大于 3.0m/s^2(以 2s 的长度按采样值求平均)。
FSRA 系统的减速度的平均变化率不应大于 2.5m/s^3(以 1s 的长度按采样值求平均值)。
FSRA 系统的自动加速度(a )不大于 2.0m/s^2。
如果 FSRA 系统工作过程中进行自动制动操作,则应点亮制动灯,当 FSRA系统执行了其他减速操作时制动灯也可以被点亮。制动灯点亮动作应该在 FSRA 系统开始制动操作后的 100ms 以内完成。为防止制动灯忽亮忽暗,在 FSRA 结束制动之后可维持制动灯亮一个合理的时间。
FSRA 系统重新开启之前应完成系统自检,自检过程可由电话开关或FSRA 系统开关触发。
")
4.3.1 不同的控制模式(车间时距控制和车速控制)可自行切换。
4.3.2 τmin为可供选择的最小的稳态车间时距,可适用于各种车速下的FSRA 控制。τmin(v)应大于或等于 1s,并且至少应提供一个在1.5s~2.2s 区间内的车间时距。
4.3.3 对静止目标的响应不是 ACC 系统所应具备的功能。若 ACC 系统不能对静态目标做出响应,则应在车辆的用户使用手册中予以声明。
τ min 为可供选择的最小的稳态车间时距,可适用于各种车速下的巡航控制。τ min(v)应大于或等于1s。
cmin为跟踪控制模式下的最小稳态车间距,可适用于各种车速 (包括保持状态)下的巡航控制。cmin 应大于或等于 2m。
在稳定状态下,最小车间距应为 MAX( cmin,τ min× )。过渡过程中的车间时距可能会暂时低于最小车间距。在这种情况下,系统应在一定时间内恢复到预先设定的车间距。
当车速大于 8m/s 时,至少应提供一个在 1.5s~2.2s 区间内的车间时距τ 。
针对全速自适应巡航系统,需满足以下最低要求:前方车辆被稳定跟踪,且当前车以astopping进行减速至车速低于vstopping时,本车应能够停在其后方。
如果前车位于 d1 至 dmax 的距离范围内,则全速自适应巡航系统需要测量本车和前车之间的距离(见下图)。在该距离范围内,全速自适应巡航系统至少应能够识别本车正前方的目标车辆。
")
如果前车位于 d0 至 d1 的距离范围内,全速自适应巡航系统需要探测前车的存在,而不需要测量本车和前车的距离和相对速度。
")
如果前车的距离小于 0,全速自适应巡航系统无需探测前车的存在。
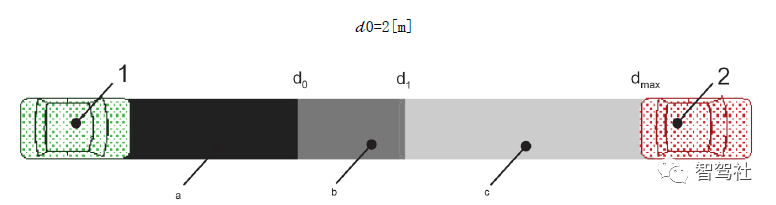
1 本车 2 前车 a 无需探测的范围 b 需要进行车辆探测的范围c 需要确定前车距离的范围
如果在直道上前方存在多辆车,或在稳定状态的弯道上,本车的全速自适应巡航系统属于 II 或III 或 IV 型,若前方车辆中不存在可能切入的车辆,则与本车处于同一车道的前车将被选作巡航控制的目标车。
")
全速自适应巡航系统能够使车辆在直道上和弯道上以车间时距τmax( vcircle )稳定跟随前车行驶。因此,如果前车沿半径 Rmin==500m 的弯道以恒速 行驶,全速自适应巡航系统可使本车以稳定的车间时距τmax( vcircle )跟随前车。
")
τmax( vcircle)—当车辆以速度 行驶时的车间时距的最大稳定值;
alateral_curve 用于分析驾驶员弯道驾驶行为(95%的驾驶员)。
")
例如,当alateral_curve =2.0m/s2时,意味着稳定通过弯道的速度为:vcircle=114 km/h。
系统可通过驾驶员确认或自动从保持状态切换至车间时距控制或纵向控制。
5.1.1试验应在水平、干燥、具有良好附着能力的混凝土或沥青路面上进行;
5.1.5 试验道路应符合GB/T 12534-1990 有关规定。
测量系统应完全独立于待测系统。对于所有测试程序,测试测量系统应能达到如下条件:
5.2.1 速度的测量仪器的量程范围宽于(0~200)km/h,加速度测量精度高于 0.2km/h,加速度测量精度高于 0.1m/s²;
5.2.2 相对位置的测量仪器的量程宽于(0~300)m,距离测量精度高于 0.05m。
激光雷达测试目标根据红外线系数(CTT)和测试目标截面积进行定义:
a) 测试目标 A 代表行驶在高速公路上的至少 95%的车辆,测试目标 B 代表无后方反射面的带有污垢的车辆;
b) 测试目标 A 和 B 的最小截面为 20cm²;
c) 测试目标 A:CTT 为 2.0m²/sr±10%的漫反射材质(见附录 A);
d) 测试目标 B:CTT 为 1.0m²/sr±10%的漫反射材质。
毫米波雷达测试目标通过雷达截面积(RCS)进行定义,对于不同的电波频率范围 20GHz~95GHz,应明确雷达截面积的定义(见附录A):
a) 目标 A 代表行驶在高速公路上的至少 95%的车辆,目标 B 代表摩托车;
a) 目标 A 代表行驶在高速公路上的至少 95%的车辆。目标 B 代表摩托车;
b) 测试目标 A:形状满足乘用车要求,具备后车窗、车灯、车牌、轮胎等图案;
c) 测试目标 B:形状满足摩托车要求,具备车灯、车牌、轮胎等图案。
车辆参考平面相当于从距地面 0.2m 处开始,宽为自车车宽、高为 0.9m 的矩形。探测区域考虑车辆前端平面内的不同位置。探测区域也受到乘用车的最低高度的限制。在测试中,在、、处时,测试
目标应至少在能够探测到的车辆参考平面内的一个位置。测试目标在处时,仅需要探测整个参考平面内的一个位置。(如图 6)
——在自车和测试目标运动过程中进行区域测试,在自车和目标车辆为静止状态下可进行补充测试。目标出现后,最大目标探测时间不应超过 3s。
")
自车纵轴相对于目标车辆纵轴的横向位移应小于0.5m。
")
目标车辆应以") 的减速度减速至停车。
当自车通过汽车全速自适应巡航控制系统停止在前车后面时,测试被认为测试成功。
自车在稳态跟车控制状态下跟随目标车辆行驶至跟车停止。
自车纵轴相对于目标车辆纵轴的横向位移应小于0.5m。
的减速度减速至停车。
当自车通过汽车全速自适应巡航控制系统停止在前车后面时,测试被认为测试成功。
自车在稳态跟车控制状态下跟随目标车辆行驶至跟车停止。
自车纵轴相对于目标车辆纵轴的横向位移应小于0.5m。
")
目标车辆应在停车后 3s 内以 amax 不大于 2.0m/s2 的加速度起步。
当自车通过汽车全速自适应巡航控制系统跟随前车起步时,测试被认为测试成功。
两辆相同的前车以Vvehicle_start的车速在两相邻车道行驶。两前车的纵轴间距为3.5m±0.25m。前车宽度应为 1.4m~2.0m。自车在稳态跟车控制状态下跟随一辆前车行驶。自车所跟随的前车确定为目标车辆。车间时距为τmax(Vvehicle_start),设定车速大于Vvehicle_end。自车纵轴相对于目标车纵轴横向位移应小于0.5m。
")
目标车辆加速至Vvehicle_end。若在自适应巡航控制下自车超过相邻车道的前车,则该测试成功通过。
")
自车在稳态跟车控制状态下跟随前车以 vehicle_start的速度行驶。前车宽度应为 1.4m~2.0m。自车所跟随的前车确定为目标车辆。车间时距为τmax(Vvehicle_start),设定车速大于vehicle_start。自车纵轴相对于目标车纵轴横向位移应小于0.5m。
")
注:若车辆无法达到该速度,则应使用 vvehicle_start = 22m/s 。
目标车辆以 vlateral=0.6m/s 的横向速度切出至相邻车道。若在自适应巡航控制下自车以设定车速 vset 继续行驶,则该测试成功通过。
两辆相同的前车以vehicle_start的车速在两相邻车道行驶。两前车的纵轴间距为3.5m±0.25m。前车宽度应为 1.4m~2.0m。自车在稳态跟车控制状态下跟随一辆前车行驶。自车所跟随的前车确定为目标车辆。相邻车道另一辆前车与自车纵向距离为30m。车间时距为τmax(Vvehicle_start),设定车速大于vehicle_start。相邻车道内自车纵轴相对于目标车纵轴横向位移应小于0.5m(如图8)。
注:若车辆无法达到该速度,则应使用 vvehicle_start = 22m/s 。
相邻车道车辆以 Vlateral=0.6m/s 的横向速度切入自车车道。若在自适应巡航控制下自车识别切入的新目标车并保持车间时距跟车行驶,则该测试成功通过。
该测试应考虑道路几何形状的预测和自适应巡航系统传感器检测区域。不同的道路几何形状的预测和前方目标探测方式不同,其结果会导致需要不同的行驶工况。
测试场地应包括固定半径500m的圆形轨迹或固定半径弯道上的一段。半径应为Rmin的80%~100%。车辆在轨迹上的行驶方向应为顺时针和逆时针。关于车道标线、防护栏等无限制。
")
测试场地示意
目标车辆应配备有如 6.3 定义的测试目标A。其余暴露在外的车辆表面应进行遮盖,测试目标后表面雷达散射截面RCS 应小于 2m²或使其有小于20%的测试目标的反射率。
自车在跟车控制状态下跟随目标车辆沿相同路径(两车纵轴的横向偏离距离应为±0.5m)行驶。两车在测试开始前应符合上图给出的初始测试条件。测试过程细节见表1、表 2 和下图。
当R = 500时,") 在适当时机目标车辆减速,监测自车的响应情况。由于与目标车辆间距减少,在车间时距降至小于2/3τmax,自车应开始减速。
在适当时机目标车辆减速,监测自车的响应情况。由于与目标车辆间距减少,在车间时距降至小于2/3τmax,自车应开始减速。
")
")
测试车道示意
立体角 ,为表面被光照射的部分与球半径平方的比,如图 A.1。
")
")
图A.1 立体角
辐射强度 I,是辐射通量对辐射源外某区域内的立体角的导数。
")
Iref是反射体外给定方向上的辐射强度,在接收器表面前测量,单位W/sr;
") 是辐射通量,单位W;
辐射通量密度 E,是入射辐射通量与照明表面面积的比。E是照明表面通过的密度。
是辐射通量,单位W;
辐射通量密度 E,是入射辐射通量与照明表面面积的比。E是照明表面通过的密度。
")
") 是入射辐射通量。
测试目标由反射体的系数定义,表现为一辆不清洁的车没有任何向后的反射装置的反射率。
是入射辐射通量。
测试目标由反射体的系数定义,表现为一辆不清洁的车没有任何向后的反射装置的反射率。
")
") 是给定方向的辐射强度,在反射体外接收器表面测量,单位W/sr;
定义了CCT的反射体(见图A.2)反射的空间分布应
是给定方向的辐射强度,在反射体外接收器表面测量,单位W/sr;
定义了CCT的反射体(见图A.2)反射的空间分布应") 。
。
")
CCT仅描述反射体(衰减)的特性。对于测试程序,角反射体(将表面减小到“一个点”)能充分满足要求。但是,如果反射体表面的整个反射率没有达到上述的要求,可以用一个更大的反射表面。
")
1-发射器 2-反射体
应该定义反射体的尺寸。根据经验当朗伯反射体的面积约为 1.7m2 时用于表示车辆最好。另一种不同的方法是尺寸约 20cm2 的“三倍”反射体。
")
1-接收器 2-发射器 3-反射体
朗伯反射体在球面范围内反射的全部能量。
")
") 是辐射通量,单位W;
是辐射通量,单位W;
") 是辐射强度,单位W/sr;
是辐射强度,单位W/sr;
") 是立体角,单位 sr。
是立体角,单位 sr。
尺寸 1.7m2 表示小型车辆的横截面。
")
1-反射体
a) RCS=10±3m2 。目前对于已知的雷达频率(24GHz,64GHz,77GHz,90GHz),10m2表示高速公路上至少 95%的汽车。对于显著不同的频率范围,需开展调查;
")
")
原文始发于微信公众号(智驾社):汽车全速自适应巡航控制系统性能要求及试验方法(征求意见稿)

")
")
")
")
")
")