
原文:《基于LCoS技术汽车车身照明数字投影灯》
作者:李标
编译:缪雯卿 郭雨欣
指导:林燕丹

随着智能化时代的来临,汽车内饰、外饰照明的发展也越来越科技化,在室外照明细分市场中,静态和动态投影大多用于“欢迎回家”场景。本文重点研究车身照明应用的动态投影,通过使用 LCoS 技术为汽车投影提供方案,讨论主要的光学要求和设计参数。
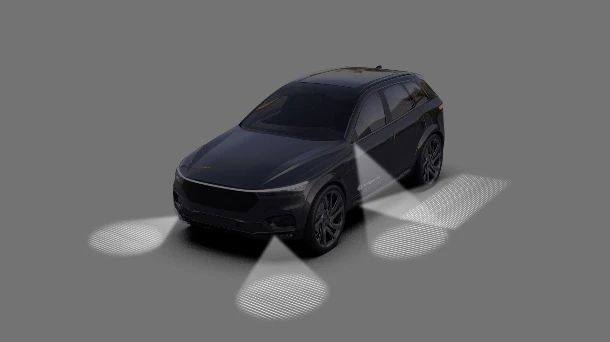
动态投影功能允许在汽车周围进行一系列交互,如图1所示。根据不同的用例场景,可以定义不同的光学性能要求,通过封装空间限制和环境要求将投影灯集成到规定的安装位置。
图1 支持不同交互场景的汽车投影
LCoS是基于液晶的技术,如图2所示,其中光从光学活性液晶下方的反射层反射。根据技术细节,可以实现不同的反射率,典型值为65% [1]。LCoS通过使用偏振光产生对比度。偏振光一般通过偏振光源或偏振器得到,激光光源已经表现出一定程度的偏振,但偏振器仍在普遍使用,其光学效率与非偏振光相比更高,例如白色LED[2]。对比度是通过显示明亮对比度的像素上的偏振旋转来实现的,而黑色像素保持其偏振。
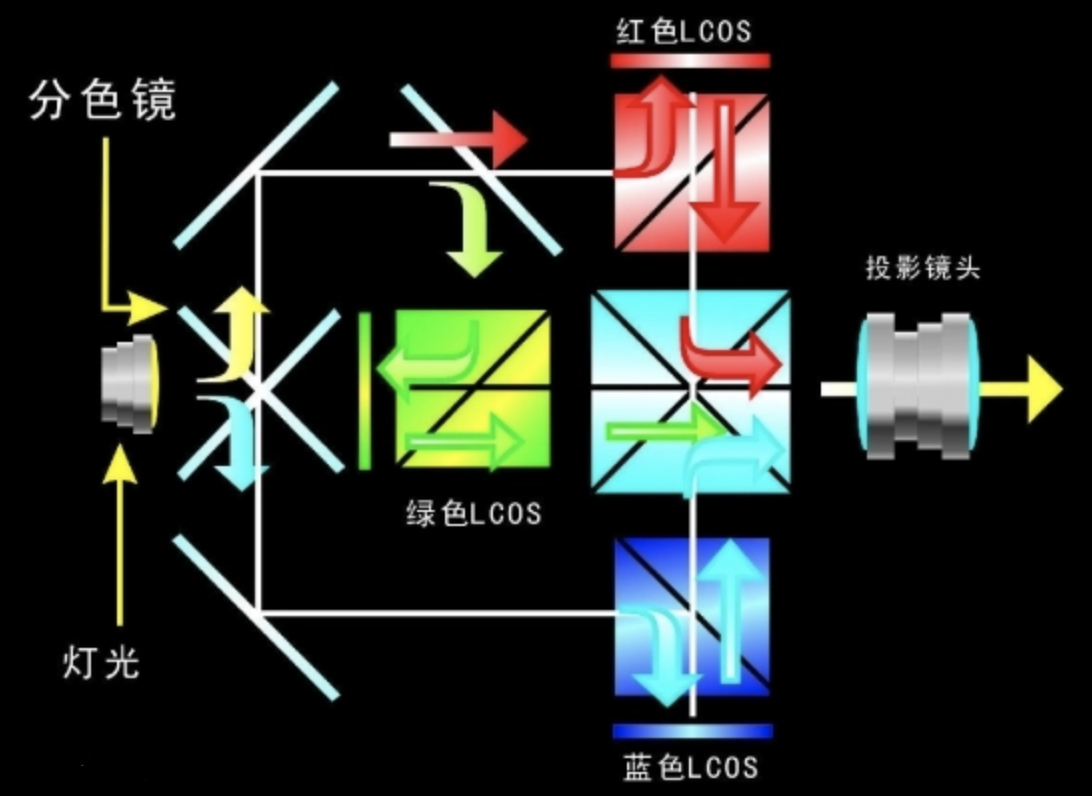
图2 LCoS显示技术
此外,光路需要从照明重定向到投影光路,这是通过使用偏振分束器(PBS)完成的。PBS针对某一个偏振具有非常高的透射率,并且它反射其他偏振分量,通常安装在相对于光轴成45度角的位置。
偏光片和PBS有不同的技术,例如玻璃或塑料上的线栅偏光片、塑料薄膜偏光片、吸收偏光片等。PBS和偏光片选择的重要参数包括可实现的对比度、透射率、环境负载下的耐用性、最大照度值、机械性能和价格范围。所有这些因素都会影响图像亮度、对比度、黑度和寿命。
投影光学需求是基于理想系统性能和物理限制之间的协调。主要性能指标是图像尺寸(面积)、照度值和图像质量。设计方面的主要限制因素是经过光学器件的光损耗和基本光输入。集成限制包括封装空间(外形尺寸)、电功耗、温度限制和其他环境要求。对于LCoS投影灯,需要在成像器前面添加偏振分束器,这对光学概念造成了限制。此外,由于需要控制成本,限制了组件数量、尺寸、材料选择和其他特性。
最重要的一个光学要求是图像照度(lux)和投影灯输出光通量(lm)。通过给定的光通量可以估计不同图像尺寸的预期照度值。在图3中显示了设想均匀照明和垂直投影,因此所示的照度值对应到图像区域上的平均值。
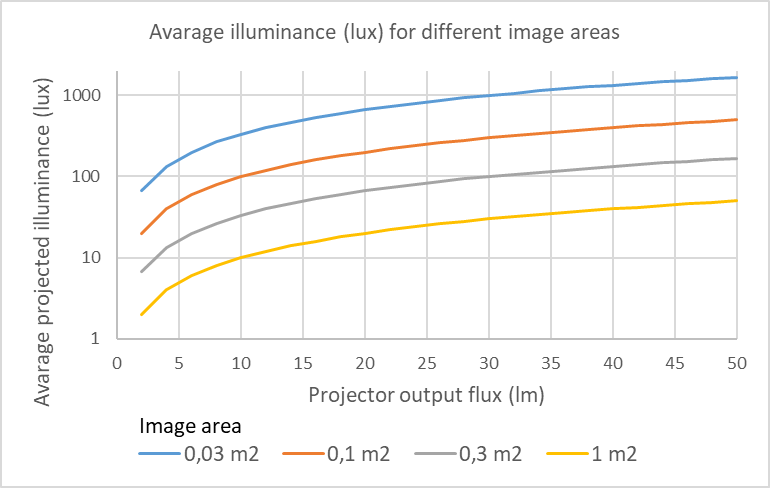
图3 平均照度
光学设计的一个重要输入是放大倍率。根据选择的图像区域,通过数字成像器的纵横比计算图像对角线,一般为比例为16:9。图表4中显示了不同代表性图形尺寸的放大率。根据定义的图像对角线值,选择相应的光学成像仪尺寸来适配放大倍率。

图4 投影透镜的倍率
成像仪尺寸的选择对于产品至关重要。更高的放大倍率通常需要更复杂的投影透镜,并可能导致更差的图像质量。更小的成像仪也会导致系统的光通量更小,因为可能的光通量与成像仪面积成正比。但另一方面,随着成像仪的缩小,封装空间会变得更小,而外形尺寸通常是产品设计中的硬性限制。在本文的设计中,选择采用0.37英寸的成像仪,它需要100倍的放大倍数才能获得大约900毫米的图像对角线。
在成像仪确定且放大倍率固定后,将使用目标投影距离来计算投影镜头焦距。图5显示了焦距与不同投影距离的放大倍率的关系。由于投影距离通常是固定的,可以根据图5讨论放大倍率对焦距的影响。当放大倍率变小时,焦距变大,这通常对图像质量更有利。在本文设计中,目标投影距离约为1m,对应的焦距约为 12mm。
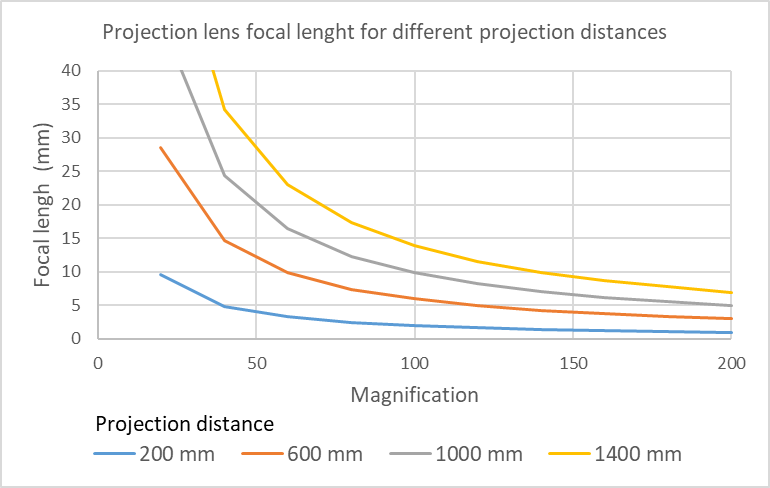
图5 投影透镜焦距
孔径限制投影光路中的光束大小,通过系统传输的光通量与孔径面积大致成正比。F数(焦距与孔径直径之比)对固定焦距处的孔径尺寸、图像质量和焦深有直接影响。图6显示了孔径面积与不同F值的焦距的关系。F数越低,投影灯输出通量越高。本文的设计选择目标F数为2左右。
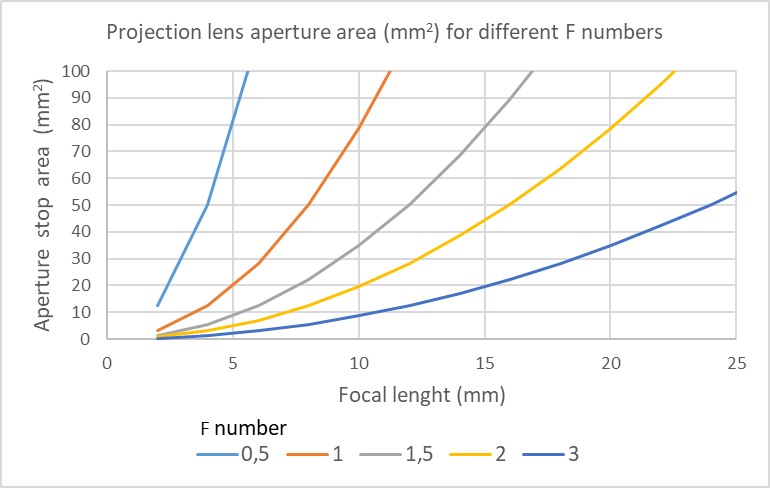
图6 投影孔径面积
光学照明器件的作用是收集来自光源的光,照亮LCoS成像器并将光传输到投影透镜。通过单透镜或双透镜聚光器实现光的收集,光收集效率是第一个目标。同时角度分布需要匹配相应的光学元件,因此设计需要在子单元之间进行补偿。
本文目标是开发具有小尺寸和临界照明的投影灯,其光学元件数量更少。可以在聚光器之后放置一个聚焦透镜,从而在LCoS上创建LED图像。通常的LED具有方形发光表面,如果要形成的图像具有矩形形状,则需要径向非对称光学元件。由于LCoS的高纵横比,这种解决方案会使系统在透镜数量和公差方面变得复杂。另一种可能性是使用与LCoS具有相似纵横比的矩形LED芯片。在这种情况下,会出现来自临界照明的已知问题,其中光源的不均匀性被重新成像到最终图像平面。通过在聚焦透镜前添加多透镜阵列(MLA,见图7)可以实现均匀照明,MLA镜头的纵横比应与LCoS相匹配。
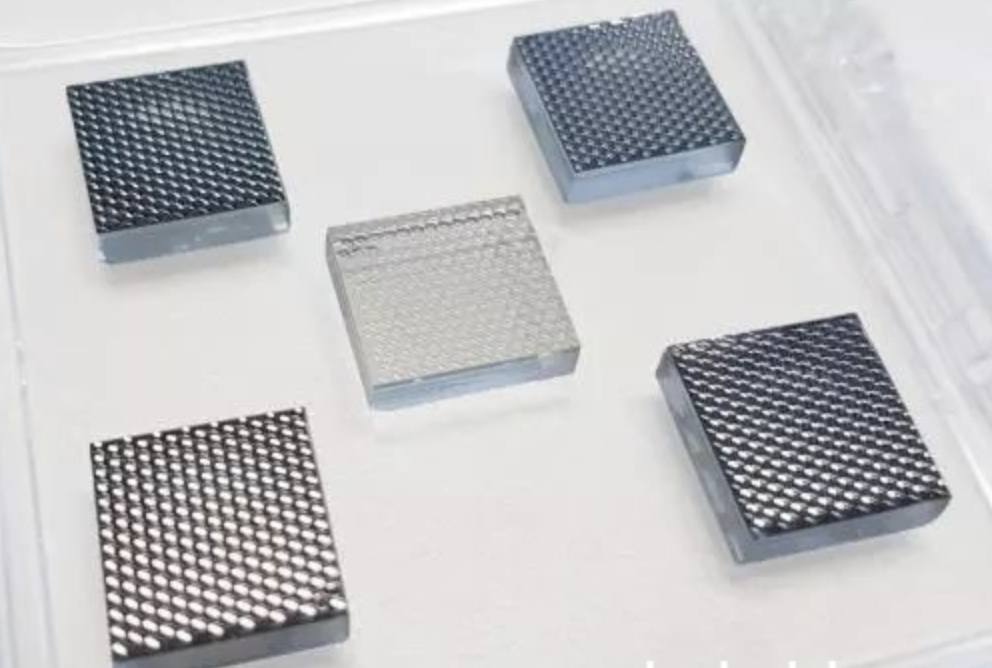
图7 微透镜阵列
此外,在系统的照明部分,PBS和偏振器占据了LCoS之前的空间。对于照明侧也可以进行与投影透镜类似的讨论。MLA透镜以给定的放大倍数成像到LCoS,光线的角度分布取决于距离和焦距。角度分布与投影镜头的透光能力相匹配很重要,否则大角度会被投影透镜挡住,造成杂散光,因此照明的F值应该和投影面相匹配。
本文研究目标是设计一个基于LCoS的投影灯,它的亮度足以支持真实的用例,并提供足够大的图像以充分利用数字技术。
(1)光源选择白色LED光源,因为目前的立法不允许外部RGB彩色投影。
(2)安装位置选择在后视镜中。
(3)1000毫米投影距离上平均达到100勒克斯,图像对角线约为800毫米,相当于+/-22度的投影光锥。
(4)成像器纵横比为16:9。
(5)图像质量要求投影图像上相距几毫米的点可分辨即可。
根据之前的分析,本文的设计选择0.37英寸LCoS成像仪,放大倍率约为100倍,焦距约为12mm,F数为2。
根据设计需求和设计目标,所设计的 LCoS 光学系统如图8所示。在照明方面,使用白色矩形LED为投影提供高流明输入,其集光率与LCoS纵横比相匹配。单透镜聚光器为照明MLA,来自MLA的混合光使用傅里叶透镜聚焦到LCoS上,通过F数匹配投影透镜提供均匀照明。光穿过PBS板,从LCoS反射,从PBS反射,并在进入投影镜头之前通过偏光片。F数为2、焦距约为12mm的投影透镜由四片镜头组成。
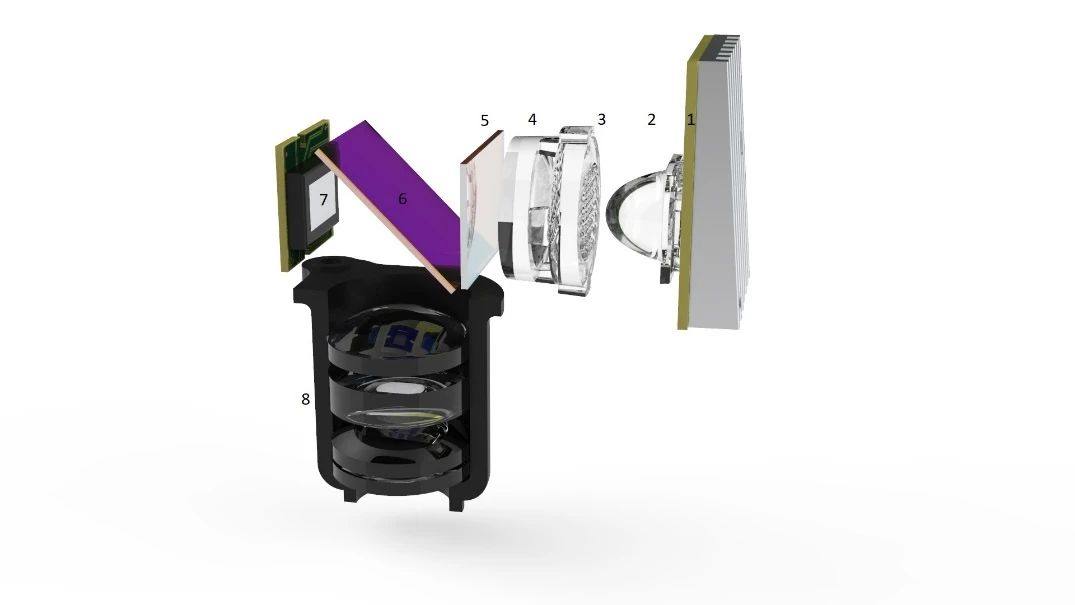
图8 LCoS光学系统:(1)白色光源LED PCB线路板;(2)聚光器;(3)多透镜矩阵;(4)透镜;(5)偏光片;(6)偏振分束器;(7)LCoS;(8)投影透镜
图像模拟显示,道路上可实现的光通量约为27lm。在1m目标距离上对角线约800mm的图像上,最大照度值将在100勒克斯的范围内。典型的均一性可以控制在4:1的范围内。投影图像显示了一些失真,可以通过LCoS软件进行补偿。图像质量可以根据关系曲线(MTF)进行分析,如图9所示。
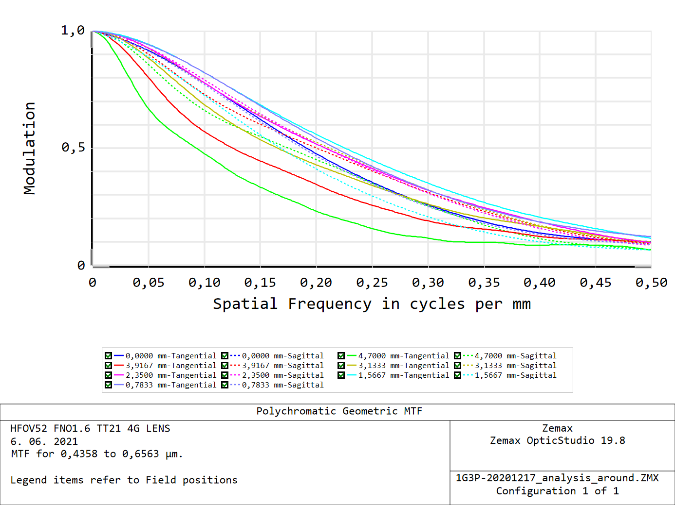
图9 图案透镜关系曲线
使用哪种数字成像仪对于特定应用是一个复杂的问题,需要针对一组给定的要求进行详细分析。这里将讨论基于LCD的技术,并与数字微镜器件技术进行简要比较。
基于LCD的技术(如LCoS或透射式LCS投影灯)的主要限制是需要使用偏振光。在使用白色LED照明时,至少会损失一半的光。而如果使用RGB激光光源将会有很大的改进潜力,但设计由于针对的白光LED应用,若改为RGB方案则需要增加封装空间。另一方面,与数字光处理相比,LCoS技术具有优势。在LCoS技术中,镜子倾斜角有一个额外的限制。此属性限制了系统的F值,这个数高于本文所设计LCoS的值。虽然较小的F值会降低图像质量并且焦深较小,但正如已经讨论过的,图像质量并不是汽车用例的主要参数。LCoS系统的偏振损耗可以与数字微镜器件相比,当用较小的F值进行补偿,如果有需要可以用更大的成像仪进行补偿。
所以与替代技术相比,LCoS是具有竞争力的外部汽车投影灯,较小的图像将允许更高的照度值和改进的图像质量。
本文对LCoS投影灯在可实现的性能方面进行了讨论。对于集成到侧镜和此类应用的典型投影距离,可以实现约27lm的投影光通量,使用了0.37英寸LCoS成像仪,放大倍率约为100倍。这使图像对角线接近800毫米,图像照度值可以达到100lux左右。图像质量达到分辨几毫米大小的最小结构。在实践中,投影图像质量似乎是良好折衷方案对于满足高亮度的需求。与替代技术相比,LCoS解决方案提供了具有竞争力的产品,较小的图像将允许更高的照度值和改进的图像质量,未来如果包装空间允许,可以升级到RGB投影。

参考文献:
[1] C. Bremer, B. Lewerich, Frank Hendricks, C. Neumann, "LCoS projection system," in Proceedings of the 13th Intern. Symphosium on Automotive light-ing, vol. 18, no. 1, pp. 331-341, 2019
[2] P. Ansorg, B. Höfer, N. Danz, U.D. Zeitner, "Bending the light with LCoS," in Proceedings of the 12th Intern. Symphosium on Automotive lighting, vol. 18, no. 1, pp. 167-175, 2017
END