近段时间,特斯拉取消毫米波雷达的事情闹得沸沸扬扬。特斯拉已经坚持不用激光雷达了,为何还要取消毫米波雷达?特斯拉的AI主管给出了答案,是因为毫米波雷达的探测性能不稳定,导致与摄像头融合后带来错误,感知效果反而没有纯摄像头感知效果好。
但是,探测性能不稳定这个锅毫米波雷达不背。原因有两点:
1. 特斯拉使用的是conti的4代雷达,而且是简配版ARS408。这个型号估计很多人都没听说过,但是ARS410大家肯定都知道。410采用的是2T3R天线,MMIC用的是MR2001,MCU用的是Freescale Racerunner gen 1,这些性能已经很一般了,然而特斯拉竟然在这些基础上定制了性能更一般的ARS408,效果可想而知。
2. 特斯拉毫米波算法的不足。大家都知道特斯拉的强项是在视觉算法方面,但是在毫米波雷达算法方面就没那么强了。毫米波雷达算法跟视觉算法差异还是比较大的,毫米波雷达需要目标提取、杂波滤除、特征检测、多目标分辨等专用算法。但是显而易见,特斯拉在这块并没有太多的投入。
目前来看,特斯拉打算就纯视觉感知方案一条路走到黑,不能说这条路不对,只能说这条路风险太高。那么,特斯拉哪来的自信坚持只用纯视觉感知方案?主要有三点:
-
每天有超百万的车辆在帮特斯拉采集数据用于视觉训练。并且,这一数据还在飞速增长。
-
-
假设一下,即使特斯拉的数据库场景覆盖率已经达到99%,甚至99.999%,但是还有0.001%的场景覆盖不到。在遇到这种场景时,特斯拉该如何处理?

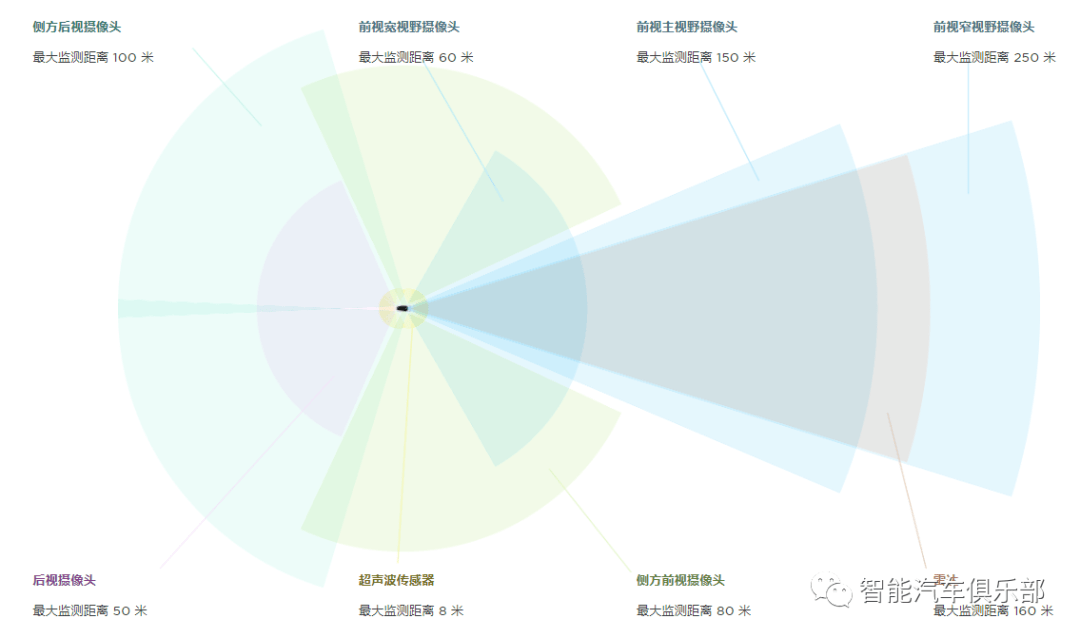
特斯拉前视摄像头
就算特斯拉视觉算法已经跟人脑无异,但是摄像头的局限性还是不可避免的。当人眼遇到强光、大雾、大雪等情况下都不能判断前方路况,更何况需要光学感知的摄像头。
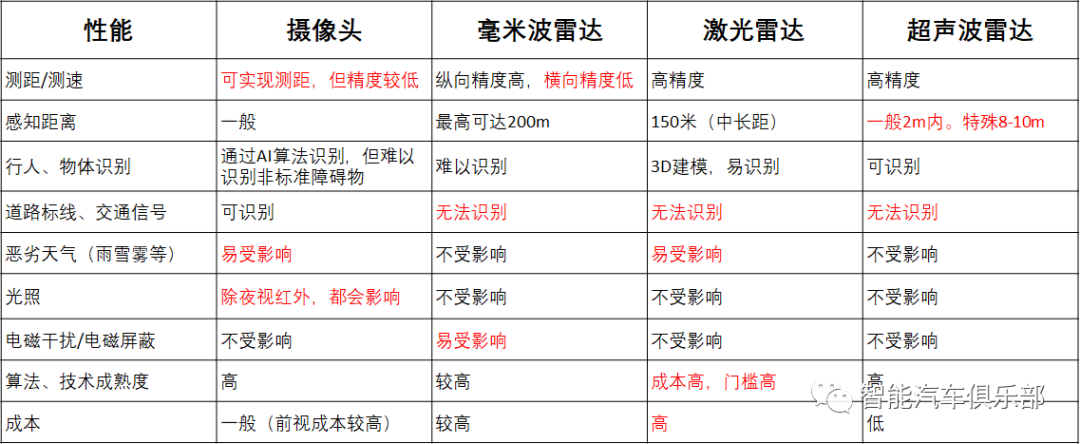
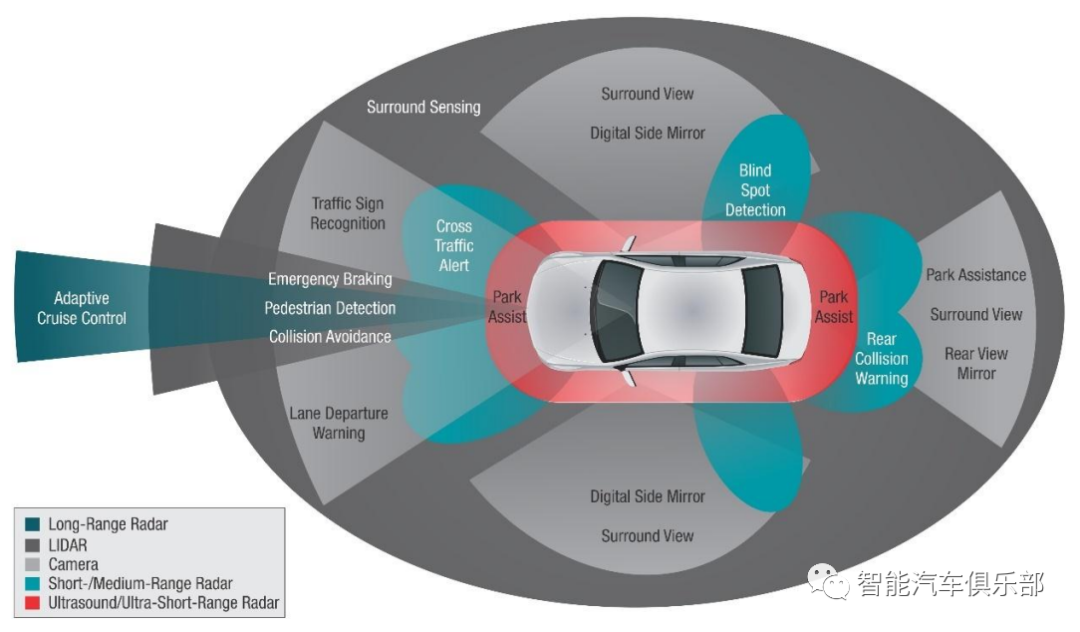
多传感器融合正是利用不同的传感器的优势弥补其他传感器的弱势,从而实现更强的感知能力。激光雷达分辨率高、可成像,摄像头可识别道路场景及目标分类,毫米波雷达测距,测速准确,受环境影响较小。三种传感器各有优势,相互融合感知才能更准确。
为促进行业的交流与发展,艾邦建有汽车毫米波雷达产业交流群,奥迪、奔驰、宝马、丰田、海拉、博世、奥托立夫、大陆、德尔福、法雷奥、电装、华为、德赛西威、均胜电子、华域、宝理、丰田合成、Zanini、四维尔、麦格纳、敏实、伟巴斯特、SABIC、科思创、巴斯夫等产业链上下游的朋友入群探讨,共谋进步。长按下面二维码申请加入。
Automotive millimeter wave radar process& technology summit forum
2021年09月17日(17 Sept.2021)
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
PCB材料及加工对毫米波雷达电路设计的若干关键影响因子介绍
|
|
|
|
圆桌会议多感知传感器激光雷达,摄像头,毫米波,超声波分别的挑战和机遇?ACC车标透波,发热,发光,的发展趋势和技术瓶颈?最新一代毫米波雷达技术的现状和发展方向?结合特斯拉战略聊一聊毫米波雷达的发展机遇和挑战?
|
|
为促进行业的交流与发展,艾邦建有汽车毫米波雷达产业交流群,奥迪、奔驰、宝马、丰田、海拉、博世、维宁尔、大陆、安波福、法雷奥、电装、华为、德赛西威、均胜电子、华域、宝理、丰田合成、Zanini、四维尔、麦格纳、敏实、伟巴斯特、SABIC、科思创、巴斯夫等产业链上下游的朋友入群探讨,共谋进步。长按下面二维码申请加入。