
集度ROBO-01概念车正式发布,伸缩式激光雷达搭载方式会量产吗
6月8日,集度汽车首场新品发布会ROBODAY正式举办,并发布了首款概念车型ROBO-01,承载了集度领先的设计和科技理念,并配备了双激光雷达方案,贯穿了"自由移动、自然交流、自我成长"三大产品理念。此外,集度汽车将会在11月举办的广州车展中发布首款量产车,计划2023年正式上市。


集度汽车激光雷达
集度CEO夏一平介绍,集度应用Apollo自动驾驶"无人化"能力和安全体系,全车配备31个车外传感器,包含2个激光雷达,5个毫米波雷达,12个超声波雷达,12个摄像头。
在自动驾驶方案的选择上,业内分为激光雷达、纯视觉技术两派。特斯拉坚持使用纯视觉方案,许多造车新势力则选择激光雷达感知。集度不纠结,它两个都要。
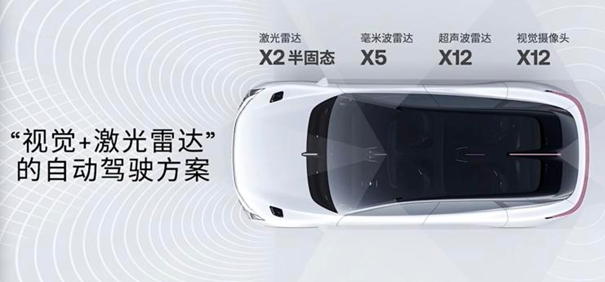
夏一平表示,"视觉+双激光雷达"两套自动驾驶系统,既保持独立运行,也能相互协同。
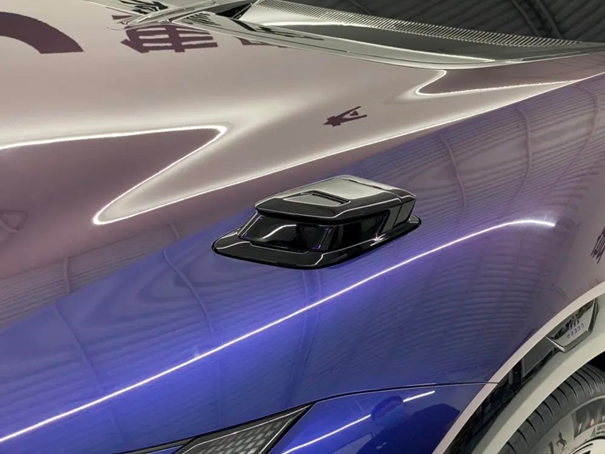
ROBO-01概念车的"跳灯式"激光雷达,在左右有遮挡物等行车场景中,对障碍物或左右横穿行人,有更强的识别能力。
路特斯激光雷达
除了集度汽车以外,今年3月份路斯特发布的首款纯电 SUV 车型 ——ELETRE也搭载了伸缩式激光雷达,Eletre搭载了4颗激光雷达,6 颗毫米波雷达,12 颗超声波雷达,4 颗 200 万环视摄像头,7 颗 800 万辅助驾驶摄像头 ,1 颗车内摄像头。
据悉,路特斯Eletre 的激光雷达位于前挡风玻璃的顶部,以及两侧的前轮拱,为伸缩式激光雷达,配合车顶曲线、隐藏式门把手等设计,不仅让整车的造型十分美观,而且确保了超低风阻系数。
激光雷达安装位置分析
在业内人士看来,概念车激光雷达安装位置在量产时或将有所改变,目前这个安装位置过不了最新的行人碰撞法规,最新法规规定,发动机盖要全部覆盖在灯上面,且机盖和灯必须有足够的缓冲区。

量产装载位置将是如何,我们拭目以待,顺便给大家聊聊激光雷达的搭载位置,随着激光雷达技术的日益进步,参数性能的不断递增,给了产品结构布置更多空间,安装位置呈现多元化趋势。
1.放置在车顶
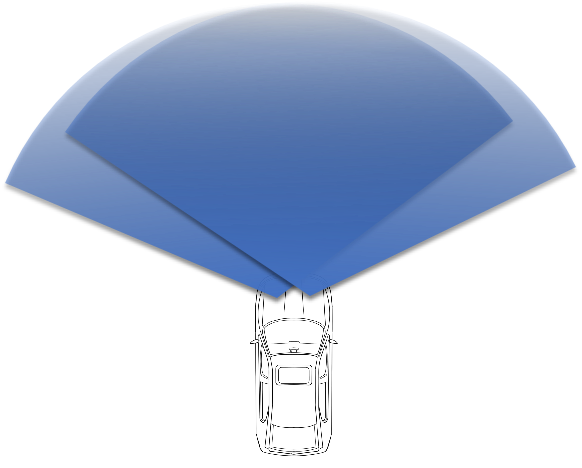
安装在车顶正前方,是目前激光雷达较为主流的设计方案,例如理想L9、蔚来ET7。其实现的功能为前方碰撞预警(FCW)、自动紧急制动(AEB -前向)、自适应巡航(ACC)以及作为高阶自动驾驶功能的目标探测传感器。适用于大部分前向场景的探测。

该安装方案在硬件成本、防污和碰撞维修成本等方面优势明显。
同样也是因为车顶高处的位置特性,在工程设计中面临几个技术难点。
首先,车顶较其他位置更易受到太阳光直射,对激光雷达的散热性能提出了较大挑战。清洗装置的使用也较难把控。

其次,激光雷达线束向下探测时,会受到前方引擎盖影响,车辆正前方有一定盲区,近距离目标探测受限。
2.放置在车前方左中右处
当一颗激光雷达无法满足功能场景需求,主机厂也会选择多颗激光雷达的组合配置方案。市场现有的多激光雷达方案之一是放置在前方左中右,例如ARCFOX极狐,将三颗激光雷达安放在车前方的保险杠和车前格栅处。可应用于前方碰撞预警(FCW)、自动紧急制动(AEB -含十字路口)、自适应巡航(ACC)功能。组合后的水平FOV会更大,对于头顶式一颗激光雷达无法覆盖的十字路口场景盲区也能进行有效探测。

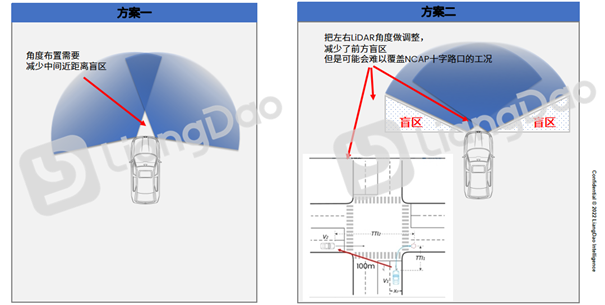
还有一种安装方式是在前方左右两侧,如小鹏P5,两颗激光雷达装于前侧左右保险杠处。该位置设置除了前段提到的3颗激光雷达所面临的难点外,还需要注意两边激光雷达的角度布置,解决近距离盲区和十字路口AEB工况的问题(如下图所示)。
3.放置在前引擎盖上方左右
第三种就是集度的激光光雷达搭载方案。其实现功能和第二种前方左中右的方案大致相同,对防污的要求较小。但是,由于前引擎盖受太阳直射,温度较高,在散热、防水、碰撞维修成本等问题上会面临考验。最重要的一点是,引擎盖是活动部件,会对使用和标定造成风险,需要严格的在线动态标定,确保激光雷达硬件的可靠性。
和安装在车顶的方案类似,安装在引擎盖上,影响激光雷达的盲区大小的几个因素构成:垂直FOV①,LiDAR的安装高度(Height1),LiDAR所能调整的向下倾斜俯仰角②,以及引擎盖遮挡的限制。

弹出式的装机方案,主要的挑战在于工程化的可靠性,比如说,使用过程中因为机械老化,震动等原因导致安装角度的偏移,对Online Misalignment detection and correction(在线错位检测和纠正)的要求极高。
小结
激光雷达安装在哪个位置才是最合适的呢?
从前面几个安装方案的分析可以看出,激光雷达的安装位置需要考虑到以下几个方面:
①外观
②散热
③碰撞保护
④表面防污
⑤设备干涉
⑥尽可能小的盲区
⑦成本
对于OEM而言,首先需要关注的是车身ID设计、车身外观和功能定义,并兼顾激光雷达的位置选定。而激光雷达的布设方案设计的出发点,应该是是否满足功能场景的需求与工程落地之间的平衡点。
作为激光雷达系统供应商,需要做的是解读OEM对于激光雷达功能的需求,转化成LiDAR的探测覆盖范围分析,同时考虑到应用场景的复杂多样性和车身ID设计,进行光学模拟,最终实现设计方案落地。
作为业内专业人士的您认为哪种搭载方式更加合理呢?
插入投票

欢迎加入艾邦激光雷达产业通讯,目前有2700人,涵盖各大激光雷达厂商以及主机厂相关负责人,点击下方标签可以筛选
激光雷达 主机厂 自动驾驶 应用终端 激光器 VCSEL 光探测器 传感器 光学元件 光学模组 滤光片 振镜 光学部件 雷达罩盖 胶粘剂 电子元件 半导体 芯片 tier1 零部件 非标自动化 五金 线路板 电机 镀膜 镀膜设备 塑胶制品 汽车电子 表面处理 汽车配件 设备 检测设备 连接器 塑料 材料 软件 贸易 代理 高校 研究所 其他
资料下载: