
昨天同事在交流一个事情,在自动辅助驾驶的硬件系统中,出现了一些分歧:目前探索前锋的几家企业,对于视觉搭配激光雷达,用毫米波的辅助,这三种主要感知路径的搭配存在分歧的,不同车企的演进路径搭配并没有趋同和

昨天同事在交流一个事情,在自动辅助驾驶的硬件系统中,出现了一些分歧:
目前探索前锋的几家企业,对于视觉搭配激光雷达,用毫米波的辅助,这三种主要感知路径的搭配存在分歧的,不同车企的演进路径搭配并没有趋同和收敛。这对于我们判断将来的发展和确定投资机会带来了很大的挑战。我记录一下参加激光雷达研讨会的一些信息,这一次是主要围绕蔚来汽车的激光雷达的一些内容。
目前头部的几家企业,在薄弱环节处理的方法都在堆料(管理层要缩小和特斯拉的差距,软件需要异构的系统和高算力的系统实验自己的想法,数据不够多感知和算力来凑),是通过整合供应商和芯片企业的技术,来实现自己的能力跨越。
这里实际采购成本预估都不会低于2-3万元,类似蔚来汽车这样的4-5万要出头。这个数字确实是非常高的,但是这又是一个暂态,并不会一直这么下去,你想要和特斯拉比性能,你的成本是别人3-4倍,这事情长期就看各家的技术人员处理收回来的数据速度,看能不能提高算法,快速收敛。

▲图1.智能辅助驾驶硬件

Part 1
蔚来汽车的激光雷达
蔚来汽车汽车采用的是Innovusion激光雷达,这家成立于2016年是蔚来汽车零部件生态的一员,蔚来汽车用的是激光雷达猎鹰(Falcon),是目前已知的用在量产车上最贵的一个产品。激光雷达LiDAR(Light Detection And Ranging)包括一个单束窄带激光器和一个接收系统,基本的原理是激光器产生并发射一束光脉冲,打在物体上并反射回来,最终被接收器所接收。接收器通过测量光脉冲从发射到被反射回的传播时间,计算出车辆与反射物之间的距离。激光雷达发射并接受若干光脉冲,通过计算自身与周围障碍物之间的距离,输出三维空间数据。
激光雷达本是一个仪器设备,目前作为一个车载的感知期间,要大规模使用了,这个部件的价值量很贵,所以国外的一圈激光雷达在美股上市了(Ouster、Velodyne LiDAR、Luminar、Innoviz和Aeva),国内的一圈禾赛科技、速腾聚创做了很多定点,也要准备IPO了。
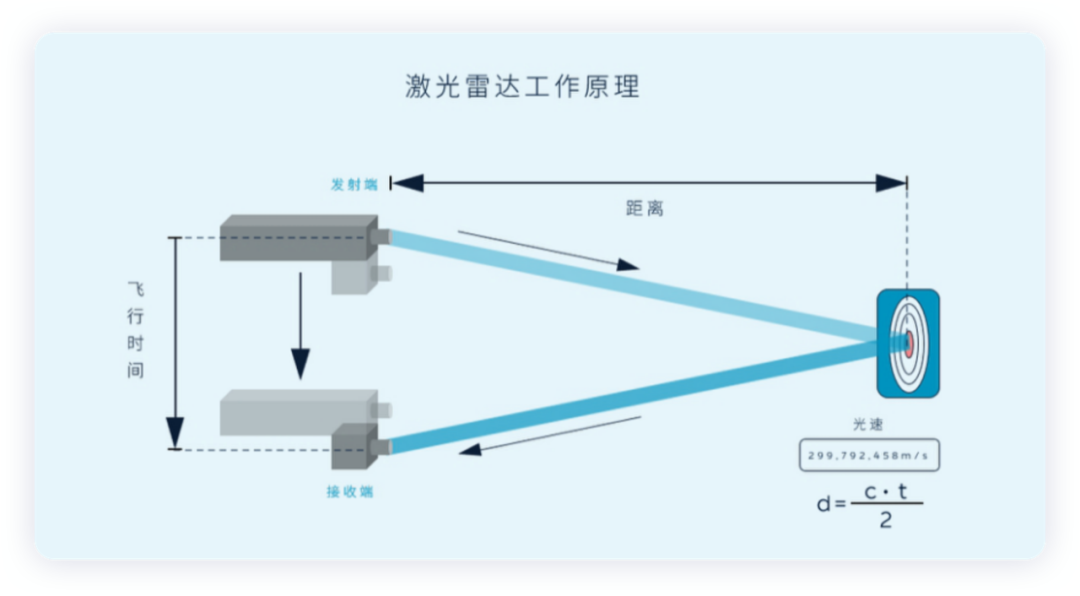
▲图2.激光雷达的原理
从技术逻辑来看,摄像头+毫米波雷达的方案在面对强光、隧道逆光、黑夜、未经算法训练的物体等场景下难以可靠识别障碍物。摄像头、甚至多目摄像头,配合视觉算法,依然较难提供自动驾驶感知层面至关重要的深度信息,目标物体越远,深度信息精度越低。在感知存在一定的局限条件下,国内的目标是首先进入城市L2+,因此面对中国复杂的场景,中国的车企寻求使用激光雷达支撑量产车实现从辅助驾驶到城市自动辅助驾驶的进化。
激光雷达通过收集反射光脉冲,输出三维空间数据,并为视觉传感器提供可靠的深度信息。激光雷达加入后,整体传感器达到互为冗余,达到整车感知的升维,提升感知的可靠性。车辆可有效识别路面凸起、井盖缺失、抛洒物、大型静止障碍物等目前摄像头难以识别的目标。
蔚来ET7搭载的超远距高精度激光雷达,最远探测距离达500米,10%反射率下探测距离达250米,拥有120°超广水平视角和0.06°*0.06°超高分辨率,是全球首款实现大规模量产的1550nm激光雷达。它的基本逻辑是,1550nm激光拥有比 905nm更好的人眼安全性。
人眼可见光波长范围为380nm~760nm,使用1550nm激光可以避免在使用中,对环境中的路人视网膜上聚焦成点,通过眼球过程中大部分都会被水吸收,因此这个产品是完全的ESG的,不会对人眼造成危害。而905nm激光则更接近可见光波长,容易在人眼视网膜上聚焦成点,万一有个熊孩子盯着激光雷达看,就麻烦了,所以905nm的激光雷达的光功率上限较低。
在设计的时候,1550nm激光雷达可使用更高功率,然后把激光打出更远, 1550nm波长激光抗干扰能力强、光束准直度更好、光源亮度高。所以1550nm的激光雷达,本身就是贵的代名词。
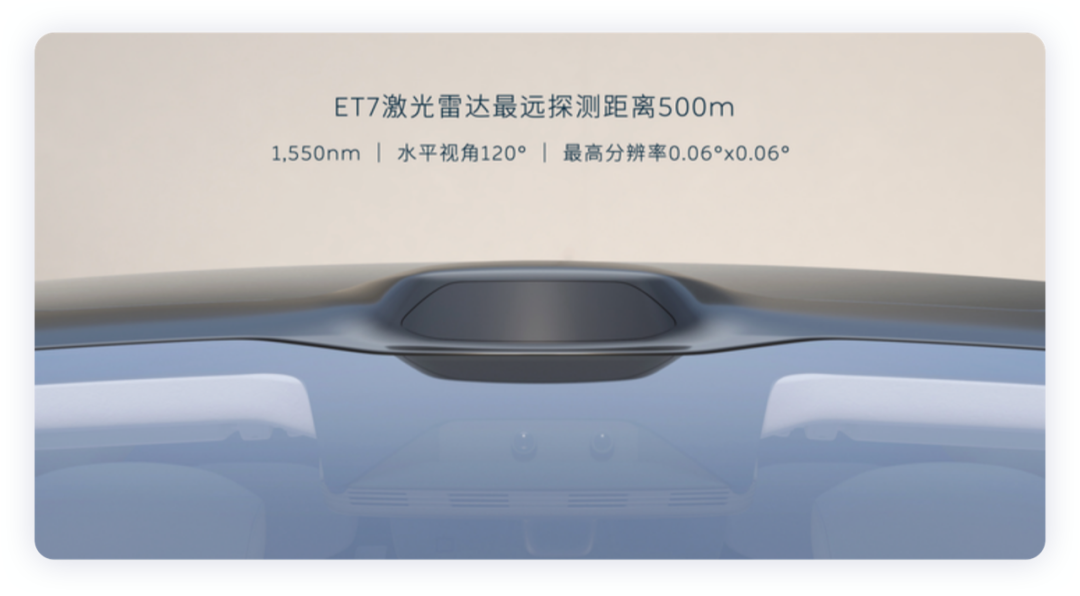
▲图3.蔚来的激光雷达
1550nm波长激光的光斑非常小,在100米外光斑直径仅为905的四分之一。在探测100米处的行人时,可以接收到横排4个点,纵排️7个点的脉冲,清晰地探测到行人的姿态。这款激光雷达最远探测距离可达500米,10%反射率标准下的探测距离,可达250米。
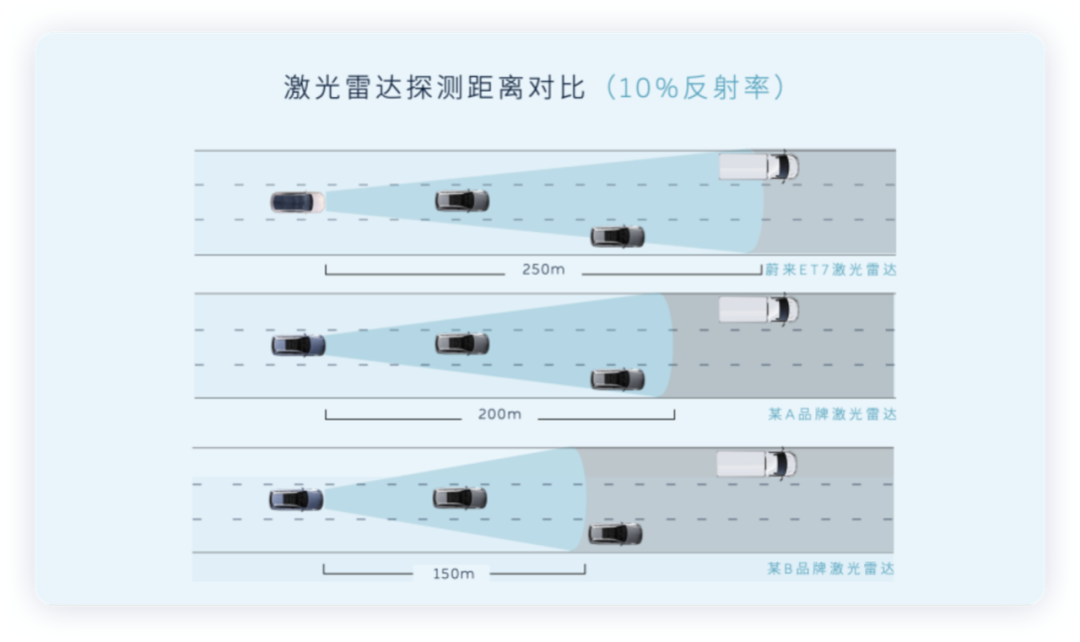
▲图4.激光雷达探测距离的差异
当然这个探测距离的差异,主要是在高速道路上,降低刹车距离考虑的。当高速路上,出现静止的路障车的时候,自动辅助驾驶控制的车辆需要紧急刹停时,车速越高需要的刹停距离越长。2021年蔚来吃了亏,因此在这里的技术选择上,要选择更长的探测距离,有助于在高速行驶时,更早发现有没有在修路等非常规状况,能提早制动或者采取变道措施。
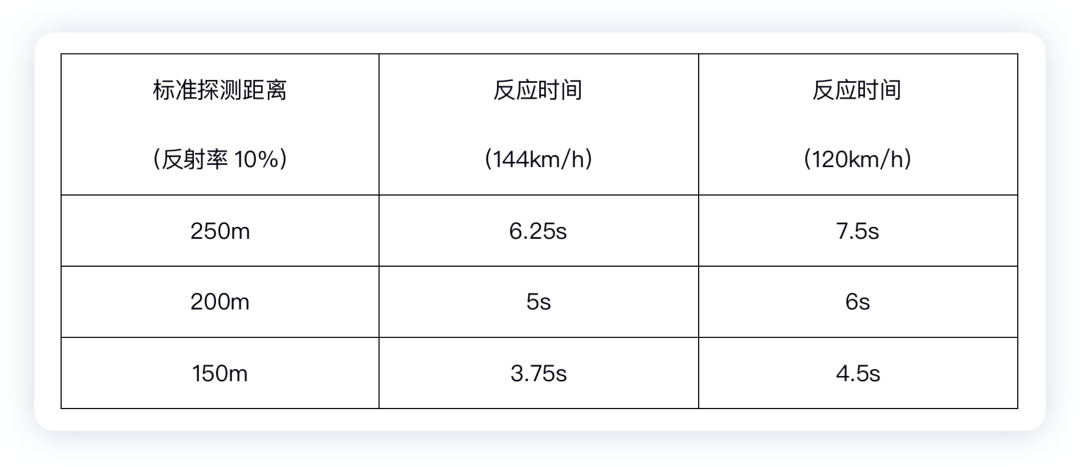
*120km/h=33.3m/s,144km/h=40m/s
Part 2
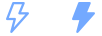
激光雷达的分辨率
激光雷达,还有个分辨率的问题。每0.01°的角分辨率变化,在200m处,相邻的两个点距离约在3.5cm。以0.1°角分辨率的激光雷达为例,其接收到的相邻两点间隔35cm,对于行人、自行车、摩托车这样的目标物体,点云过于稀疏,也就是说激光雷达起不到好的作用。
▲图5.激光雷达的角分辨率
因此想要解决城市的问题,激光雷达需要在行车关键视野区域产生高密度点云,将该区域的目标看得更清晰。这款激光雷达的功能范围为25°H(横向)*9.6°V(纵向)。在前方50m处,覆盖范围是横向覆盖达10条车道,纵向覆盖大于一层楼高度。其实在道路中,选择加密关键区域,根据需要随时让任意区域分辨率高起来。实现对车辆与行人等更好地感知和追踪,即便在前方大曲率转弯或者上下坡道等工况下,也可以有效地提前发现远处危险目标。在城市的道路上,及早采取策略,才能更早地减速(城市Pilot对手盘是美团和饿了么小哥,属于神行飞人的那种),搞不定的时候,得让消费者自己来,提高自动驾驶的可靠性和安全性。
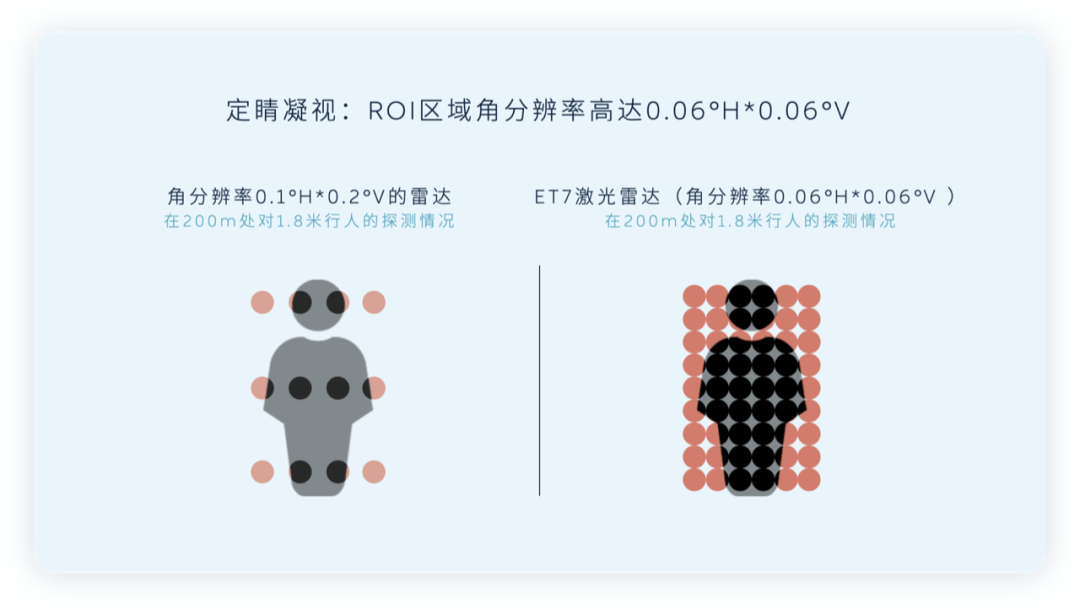
POD,探测概率Probability of Dectection,一般为超过连续100帧发射的激光束数量(即理论点数量)与被探测到的激光束数量(即有效点数量)的比值。POD体现出激光雷达接收返回点数的能力和稳定性,是反应激光雷达性能的一项重要指标。感知250m处10%反射率物体的探测概率超过90%。
▲图6.激光雷达不能白用,有效性
小结:等上海的疫情好一些,我打算去禾赛的青浦总部看一圈,中国的激光雷达是有机会跑在前面的,关键是前面几家怎么快速进入量产状态,把它的研发、制造和质量跑通,从年产几千台到月产几千台,怎么有效降低成本,这都是下一个我们看这个领域的投资重点。
责编:Admin
文章来源及版权属于汽车电子设计,EDN电子技术设计仅作转载分享,对文中陈述、观点判断保持中立,不对所包含内容的准确性、可靠性或完整性提供任何明示或暗示的保证。如有疑问,请联系Demi.xia@aspencore.com
原文链接:https://www.ednchina.com/technews/16469.html

欢迎加入艾邦激光雷达产业通讯,目前有2700人,涵盖各大激光雷达厂商以及主机厂相关负责人,点击下方标签可以筛选
激光雷达 主机厂 自动驾驶 应用终端 激光器 VCSEL 光探测器 传感器 光学元件 光学模组 滤光片 振镜 光学部件 雷达罩盖 胶粘剂 电子元件 半导体 芯片 tier1 零部件 非标自动化 五金 线路板 电机 镀膜 镀膜设备 塑胶制品 汽车电子 表面处理 汽车配件 设备 检测设备 连接器 塑料 材料 软件 贸易 代理 高校 研究所 其他
资料下载: